|
|
||
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| People have been dereaming of household robots for years. Since the 20th century they have been promising that they will be here. During the 1950's the House of Tomorrow concept was popular. These would be luxurious houses that freed people from the drudgery and every day live with a multitude of labor saving devices. One of the most popular was the household robot capable of cleaning, dusting, cooking, gardening, pet feeding, baby sitting, and other chores normally done by humans. Today we see the beginnings of the domestic robot industry with the arrival of robots such as Roomba, the household vacuum cleaning robot. Now people are expecting more, but just where are domestic service robots going? What will they become in the future? Will there really be robots doing all of the daily work in the future? | |
|
Some Japanese companies are already working on a general all purpose 'Bicentennial Man' type of humanoid servant robot. But this type of robot is still far from being practical for the comman home. The near future does hold the hope for smaller, less capable robots that can do easier tasks like vacuum cleaning, lawn mowing, floor/window washing, security patrolling, carrying clothes to the laundry, taking out the trash, serving food, getting the mail, feeding pets, or watering plants. Many of these robots are already in design and some are even on the market. In just a few years they should be improved enough to work well and the market will increase. More of these robots will mean they will become cheaper which will get more people to buy them and use them in their homes. Today you can purchase the Roomba vacuuum cleaner at Sears. It costs just a little more than a full size regular vacuum. Of course, it doesn't do as much, but it does vacuum the floor. |
 |
|
Some companies, like Shadow Robot Company, are developing very sophisticated robots that mimic humans. The Shadow Biped is an example of this. It has been in develoment since 1987. A lot of technologies that they have developed are being used by other robot companies in their projects. The skeleton of the Shadow Robot uses wood, Maple is the best. It is cost effective and very strong and can be machined easily. The future robot will need anthropomorphism or two legs. All of human houses are made for people who walk on two legs. Instead of changing the houses to fit robots, the future will bring robots that have been changed to fit human houses. These robots will be able to do things like climbing stairs. The future robot will be designed to operate in any environment that a human being operates in. To further the development of robots like this research into the anatomy and physiiology of humans is necessary. This could even impact other research like the development of prosthetics. The Shadow bipedal robot is a two legged walking robot. It is powered by air muscles and is 160 cm tall. It is a research prototype and is used to develop the designs for real walking robots of the future. The structure of the robot is somewhat like humans but not exactly. The bottom portion of the leg is only one piece unlike a human that has two bones. The knee is a simple joint without a kneecap. There is only one toe on the foot that is as wide as the whole foot. The hip has three degrees of freedom and the ankle two. There are five force sensors on each foot. two on the toe, one in the middle and two on the heel. These are monitored to see what contact is being made by the foot on the floor. |
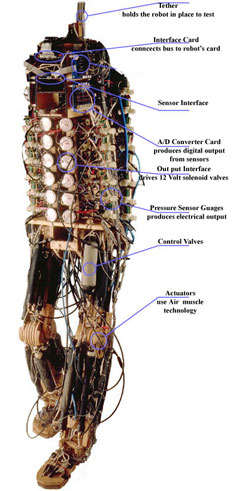 |
| The bipedal robot uses air muscles to mimic the human muslce system. Air muscles use compressed air flow and low pressure and can provide the same power to weight ratios as human muscles. There are 14 air muscles on each leg. This gives the robot 12 degrees of freedom. There is an optical sensor to measure each of the twelve degrees of freedom. The muscles are placed like human muscles. There are just fewer of them on the robot than on a human. Each of the air muscles has two valvess for control, one fills it and the other exhuasts it. |
 |
|
To make a bipedal robot walk it needs to have a sense of balance. In humans this is achieved in the inner ear which acts like a 3-axis accelerometer and inclinomeer. Future robots will have to some kind of mechanism that can measure for balance. The Shadow bipedal uses mercury tilt switches but a better mechanism is needed for the future to achieve a real walking stride. One of the biggest problems for robots of the future is the software design. a robot that can walk and perform tasks in the average house has to be very smart. The AI, artificial intellegience, needs to be developed to make robots of the future smarter. |
 |
| The future of robotics is also tied to future inventions. Many technologies have been invented long before the applicatoins wre found to use them. One example would be the laser. It wasn't invented to play CDs. The future design of robots may produce many knew products that people haven't even begun to think about. Solutions to other problems may come from the research that is going on now. |
 |