 |
 |
 |
 |
 |
 |
A Possible Solution
Presenting: "The Medusa"
Problem Statement:
How can we design a robot that will cut the costs of farming and lessen the impact of farming on the environment? The robot should be small, lightweight, capable of working in a group or swarm type environment. The robot will be able to precisely know its position in the farm, avoiding obstacles and not damaging crops in the process. In addition it will be low Maintenance and be able to charge itself.
Purpose:
Our robot's purpose will be to keep the plants healthy by keeping them free of insect pests while NOT using environment damaging pesticides. It would also be nice if we could find a way to water the plants while getting rid of the insect pests. We would also like it to be very inexpensive so the farmers won't kill themselves to buy it. Another thing we want it to be is automatic so the farmers won't have to do anything.Problems to Solve:
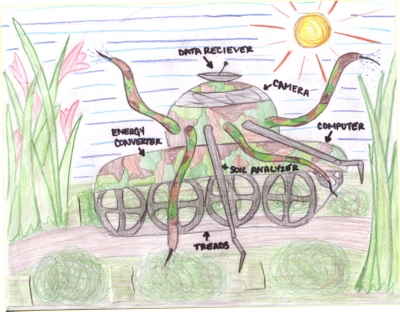
Basic Shape and Design: Our robot is a tiny tank that has eight arms that go and actually catch the bugs. This is how we made up the name "Medusa." At the end of each of the arms is a camera that can find bugs. This tank has a computer on the inside that does all of the main computing but each arm is also a separate computer networked to the main computer in the tank. The robot will have an antenna on the top so that it can get internet access and communicate with the farmer and other robots in the field. It also has treads that help it go through the uneven part of the farm and over rough surfaces. On on each side of the robot's body is a camera so it can see where it's going. In addition it uses sonar on the front, back, and side in order to keep its distance from obstacles and plants. The Medusa has sprinklers positioned in each arm which spray water on the crops as it passes. Each hole has a nozzle in it, which sprays the water evenly upon the crops. The Medusa will also have a soil probe. This soil probe will be able to test the dirt the plants are in for moisture and nutrients like nitrogen. If it determines the plant needs water or fertilizer it can give the plant what it needs directly without having to spray over everything. |
 |
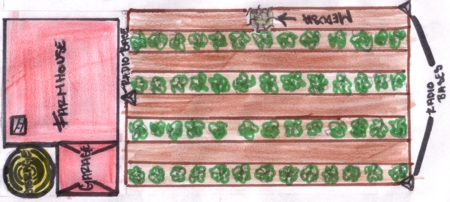 |
Navigation and positioning: To solve the problem of navigation, we have decided to put several cameras on our robot. We will place one camera on each side, to monitor the crops as it is passing by. We will have also have one camera each on the front and the back of the robot. Aside from that, we will place three radio beacons on the edges of the field, so that using it's antenna, it will be able to triangulate its position at any time during it's work. If the farmer wants to change the robot's position, the Medusa will be able to communicate with the farmer through the Internet. The farmer can give commands to the Medusa to tell it to go to other areas of the field and get reports on plant health and bugs killed. |
Bug Identification:
For bug identification, The Medusa will have cameras in each of its eight tentacles. Once it sees something that looks like a bug, it will get up close to it and take several pictures from different angles using its many tentacles. After it gets the picture it will send the picture to the computer which is on the inside of the robot. It will identify the bug as good or bad from a database of bugs kept on the computer. If it is a good bug the Medusa will continue on and look for other bugs. If it's a bad bug, the bug catching system will kick in. The Medusa catches the bugs by using a frog-like tongue. Of course, the tongue is not the actual tongue from the frog, but is very similar. The "snake" is camouflage in color, and it will track the bug that it sees, while the other "snakes" go after the other bugs.
If it determines there is a large scale infestation and cannot get all the bugs itself it can use its on-board communication system to call other robots for help.
Bug Catching: To catch a bug, one of the arms will track the bug with a sophisticated computer algorithm and will compute a targeting solution. Then a sticky frog-like tongue will shoot out at the bug and pull it in. After it grabs the bug it will find out if it will be good for fertilizer or for its own energy source. Once the Medusa decides what it will do with the bug, the bug disposal will kick in. |
 |
Bug Disposal:
Because the bugs are filled with organic matter, our robot will be self charging during periods of bug infestation. It will smash up the bugs and through a chemical reaction be able to produce power and energy for the robot. If our robot has enough power, it will store the bugs so the farmer could use them for fertilizer. Once the robots container for the bugs that is going to used as fertilizer is full, the robot will make a stop by the farm and drop off the smashed bugs in a specific place and go back to where it was in the fields to continue work.
|
Sprinkler System: The Medusa is equipped with a sprinkler system so that the farmer doesn't have to worry about watering the crops. The Medusa will take care of watering the crops as they patrol the rows of plants for bugs. The Medusa will utilize the sprinkler nozzles on it's arms to water the plants. The robot will implant a sensor in the soil that will observe the moistness of the soil and the fertilizer content. Using its arms it can directly target the plant for water or fertilizer. This will prevent over-watering, and will not waste water. |
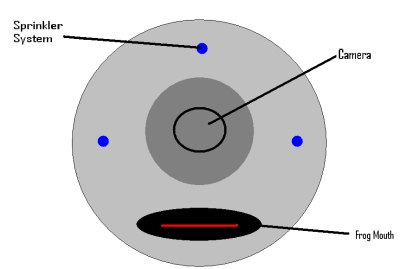
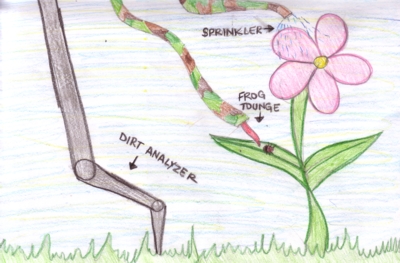
This picture shows a close-up of 3 arms of the medusa tending to a plant. The sprinkler is spraying a calculated amount of water onto the plant. Meanwhile, the frog tongue is capturing a pest that it saw on a leaf with its cameras. It will later process the bugs into a fuel. Lastly, the dirt analyzer is testing the needs of the soil. If the soil is lacking something, it will take measures to replenish it. |
 |
Cost Analysis
When coming up with the idea of our robot, a challenging problem was figuring out the cost of buying and working robots on a farm. Costs such as fuel and maintenance stumped us since all we could do was offer up an estimate, but we found a website that calculated the cost of buying and running combines on a farm, depending on horsepower (Available at http://www.farmdoc.uiuc.edu/manage/machinery/combine_calculation.asp). We decided that our robots are equal to five horsepower and that they cost about $500 in bulk. So we figured out how many Medusas could replace a combine and we punched in our own numbers. Below is a table with our results:
| Total Yearly Costs | Total Costs Per Acre | |
|---|---|---|
| 265 Horsepower Combine | $42,768 | $26.73 / acre |
| 53 Medusas | $9,399 | $5.89 / acre |
| 305 Horsepower Combine | $47,264 | $23.63 / acre |
| 61 Medusas | $11,599 | $5.82 / acre |
| 340 Horsepower Combine | $58,386 | $22.45 / acre |
| 68 Medusas | $13,003 | $5.18 / acre |
That shows how much our robot would help. It costs almost a factor of four less per year and our robots are much smaller and more efficient than combines and can do more. They also create their own fuel from the pests they process. So costs for fuel is completely eliminated. This is the perfect, cost friendly, solution. .
Conclusion: As you can see, we envision a robot that is environment-friendly, self-fueling, pest exterminating, and cost effective. The robot will eliminate the use of pesticides, and still kill the pests efficiently, which will prevent pesticides to contaminate our foods. It will get rid of the need to fuel it, for it will fuel itself from bugs. It will get rid of the barrier of cost, for it can be built from parts that you are likely to find on the shelf in a store. Therefore, our robot meets the requirements for a very efficient replacement for human labor in agriculture, and will be a very good solution for the problem. |
 |