
07-0022 Introduction History Current Developments Future Bibliography Acknowledgments About Us |
|
07-0022 Introduction History Current Developments Future Bibliography Acknowledgments About Us |
 In the future, it is hoped that robots will replace the huge, cumbersome
machinery presently used in agriculture. Our coffee based harvesting
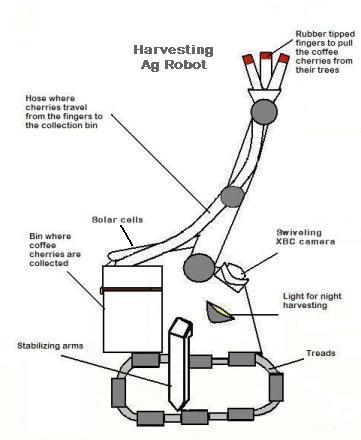
ag robot will be 4 feet in height and roughly 4 feet wide at the base.
The base will be the widest part to ensure the robot's balance and stability
on rough terrain. The robot will have treads instead of legs or wheels
to reduce the odds of toppling over. It will be equipped with stabilizing
arms that can provide additional support on rough terrain. These
stabilizing arms can fold out from the sides if the robot tilts at a critical
level.[8] In the event it does topple,
it will be able to send a wireless alert to a control center that can dispatch
help. The treads will be interchangeable so that the robot can traverse
different terrain.
In the future, it is hoped that robots will replace the huge, cumbersome
machinery presently used in agriculture. Our coffee based harvesting
ag robot will be 4 feet in height and roughly 4 feet wide at the base.
The base will be the widest part to ensure the robot's balance and stability
on rough terrain. The robot will have treads instead of legs or wheels
to reduce the odds of toppling over. It will be equipped with stabilizing
arms that can provide additional support on rough terrain. These
stabilizing arms can fold out from the sides if the robot tilts at a critical
level.[8] In the event it does topple,
it will be able to send a wireless alert to a control center that can dispatch
help. The treads will be interchangeable so that the robot can traverse
different terrain.
Our robot will have solar cells on the top of its head to power its batteries so it can run both day and night. The solar panels will be slanted backwards to keep rain water from pooling on the robot's head. The rechargeable batteries will reduce energy costs and our dependence on oil, thereby decreasing pollution in the air from carbon dioxide and carbon monoxide emissions. In order to work continuously into the night, it will be equipped with halogen headlights.
Each robot will be equipped with a vision system similar to the XBC camera system that tracks objects by distinguishing color blobs.[12] The camera will be able to swivel to get a better field of view. Its fingertips will be colored either red or yellow so the camera can see when the fingers pick red or yellow cherries. The fingertips will be coated with rubber to give them a better grip. By having the ag robots handpick the cherries, wastage of green cherries will be eliminated and the annual yield should increase. The hand will be a little basket connected to a chute located along its arm which connects to a bin attached to the robot's rear. As the cherry is picked, it will fall into the basket, down the chute, and into the bin which is secured in a cabinet. The bin can be exchanged by a collector ag robot when it is filled.
The harvesting ag robot will send a wireless message to the control center
when its bin is full. The control center will send a collector ag
robot to the harvester using a global positioning system. Once the
collector is there, it will hit a button which will open an access door
holding the bin in. The collector will then exchange the bin with
a new one and hit the button to close the door. The harvesting ag
robot can then continue working.
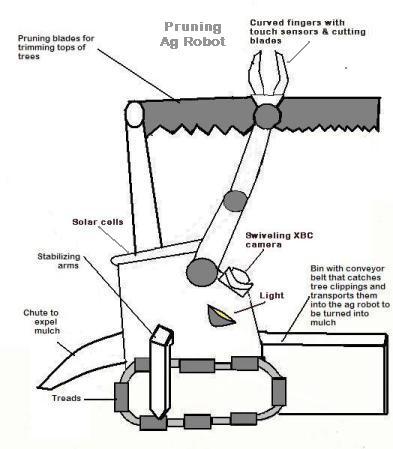
The pruning
ag robot will have fingers with touch sensors that can wrap around the
branches of the trees. If the branch is thicker than 1 inch in diameter,
the pruner will cut it off using blades in its curved fingers. It
will also have long blades that can extend from two additional arms to
saw off the tops of the trees. Keeping the trees short ensures that
the harvesting ag robot can reach the cherries. Pruning the thicker,
older branches thins out the trees, allowing more sunlight in. This
will allow cherries to develop deep within the trees, not just on the outside
edges, thereby increasing the yield.[1]
The pruning ag robot will have a large tray in the front with a conveyor
belt to catch the branches. The conveyor belt will transport the
branches into the body of the pruning ag robot where a built in mulching
machine can break them down. The mulch will then be expelled from
the ag robot's rear and be distributed to the base of the trees, providing
a natural soil enhancer that retains moisture, makes it difficult for weeds
to establish, and at the same time fertilizes the plants. This will
reduce the amount of water, herbicide, and fertilizer needed.
The present system of using drip irrigation is adequate enough for watering
and fertilizing the plants. Therefore, a robot is not necessary for
these tasks.
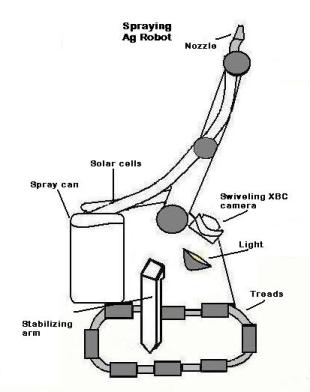
A spraying
ag robot will be able to apply pesticides on the crops at a variable rate
when needed. This ag robot will have a camera that can detect the
green scale insect and will spray the precise amount of pesticide onto
the plant, eliminating unhealthy exposure to humans and reducing leaching
into the ground water system.
All of these ag robots will work together as a single colony to take care
of the coffee trees. Although coffee is not a daily staple, a similar
technology with specific modifications can be used for other crops.
It would be based on an army of small, autonomous robots with a feed
back system of sensors and the ability to communicate wirelessly, navigate,
see, and apply solutions at a variable rate. Advances that would
be very helpful include improved sensors for a better feed back system
and better vision. The AgBo robot which costs about $7,000 to build
is able to guide itself using a laser scanner.[3]
Based on that figure, we estimate that our robots would cost roughly $10,000
because they will be able to navigate and carry out various tasks.
Today's mechanical harvesters cost around $160,000.[1]
At that price, a coffee farmer could purchase 16 of our smaller robots
which would have a higher efficiency rate and which would be able to work
continuously, thereby reducing labor costs.