Team 07-0001
 |
 |
 |
PROBLEM & SOLUTION
Presenting: Plantinator
Problem:
How can we design a robot that can care for and harvest crops in the easiest way possible for the farmer, while still yielding the best results. If this robot is successful in its work, it will be able to:
- Produce healthier crops in a more efficient manner by caring for and monitoring the health of the crops.
- Reduce the workload of the farmer.
- Reduce the costs to the farmer.
- Reduce the amount of pollution produced by the farm.
Solutions:
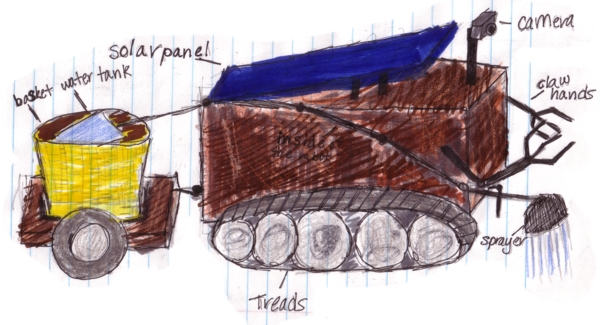
Our first rough draft appears above. |
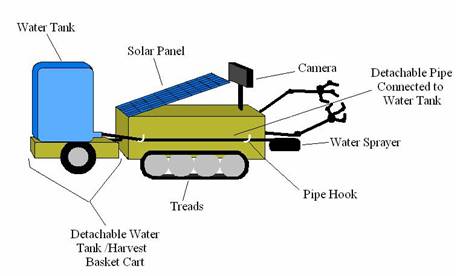
Basic Design The actual robot will be 3 feet long by 1.5 foot wide by 1.5 feet high. It will be a box shaped robot with two arms for grabbing attached to the side. The robot will have a solar panel on the top for power and a camera that can turn 360 degrees for vision. There will be a sprayer on the robot that can spray water and other things the plants may need. The robot will have a water tank behind it to supply the sprayer. The water tank can be disconnected so other attachments can be put on the robot in the future such as a reaping and sowing attachment.
|
 |
These two pictures show the attachments currently available for our robot: the watering and nutrients attachment and the reaping and sowing attachment. |
 |
Power system
To allow the robot to work at night as well as day, a solar panel will be situated on the top of the robot to absorb enough energy to power it through the night. During the day it will run off solar power and batteries, excess energy will go back into the batteries so that at night the robot can work on batteries alone.
 |
Locomotion and Navigation We will use treads for the wheels on the robot so it will be able to get more friction, and won't topple over. We have discovered through our own robot building experience in Botball that treads allow robots to move over obstacles better and robots with treads are more stable. Our robot will be mounted in a way that allows the robot to rise up to reach higher plants. There will be 3 homing beacons around the perimeter so that the robot will know where it is. The beacons will be radio beacons and the robot will be able to tune in these beacons and triangulate its position in the farm using them. |
Features
Toward the front of the robot there will be camera that can rotate 360 degrees, and is able to look upward and downward. The camera will be used to help navigate the robot around obstacles and avoid hitting plants.
There will be a base attached to the back of the robot where you can strap down a basket for harvesting crops,or a water tank for watering the plants. The base of the attachment along with the base of the robot will have two plates with wheels attached, and grooves in the plates so that the base can be changed in size if the rows of plants are bigger than what the base comes as. If a water tank is attached to the base, a hose will pump the water to a sprayer which will water the plants.
The Plantinator will have a soil probe in the front that will be able to check the nutrients, soil pH, and humidity of the soil. The computer inside will be able to determine if the plant needs water or nutrients and water the plant or give it nutrients. If the robot cant help the plant it will send a message to the farmer.
Additional Functions The Plantinator will be able to plant seeds at equal intervals throughout the entire field using its camera measure the length of each interval. The water tank can be replaced with a seed bucket and the robotic hands can be used to plant seeds at equal intervals very quickly. This would help prevent waste and make planting more efficient. The Plantinator will be able to use its camera to monitor the health and growth rates of plants. If it determines that something is wrong it can try to fix it, if it cant it can alert the farmer. |
 |
Cost Analysis
We envision that our robot will be equal to one HP of a combine. We used a website's calculations, found at [21], to calculate the cost analysis for certain combines compared to our robot's power level.
Horse Power |
Cost |
Corn/Acre |
Grain/Acre |
Average/Acre |
340 HP Combine |
$232000 |
$24.05 |
$20.87 |
$22.47 |
340 Plantinators |
$102000 |
$10.24 |
$7.46 |
$8.86 |
305 HP Combine |
$217000 |
$26.30 |
$20.97 |
$23.64 |
305 Plantinators |
$93025 |
$10.65 |
$8.76 |
$9.72 |
265 HP Combine |
$186000 |
$29.10 |
$24.36 |
$26.74 |
265 Plantinators |
$70225 |
$10.16 |
$8.70 |
$9.43 |
You can easily see that our small robot is 2-3 times cheaper than a large combine and our robot does not even need human operators!
Conclusion
Our original problem was to cut down on farming pollution and reduce costs, and we have done this by creating a robot that will shoot the water directly at each plant, not using pesticides, and reducing the use of fertilizers on the plants. In addition, our robot can be built with off-the-shelf parts that can be bought at a very cheap price, and we estimate the cost of the robot at about $300. Even if the farmer bought a hundred of these robots, the cost would be a mere $30,000, which would be much less than a fully equipped and non-automatic combine. In addition, the workload on the farmer is reduced because no one has to control the robots or hire people to take care of the crops. The farmer can sit back and relax and reap the benefits.