Team 07-0001
 |
 |
 |
(Image from http://en.wikipedia.org/wiki/Agriculture)
In this section of the website we hope to let the reader become familiar with how agriculture started, why we need agriculture and some of the major technological and tool advancements in the history of agriculture. Finally we present some current robots and research.
The beginnings:
Evidence suggests that mankind first began abandoning his hunting and gathering and nomadic ways and began farming in earnest in the Mesopotamian river valley around 9,000 BC [1]. The first crops were wild grasses and cereals, planted in the fertile ground along major river valleys and now make up a large percentage of the current world agricultural production [2].
 |
Long before the use of machinery, when mankind relied mostly on farming by hand, farmers depended upon simple hand-made tools, such as the crude wooden plow pulled by animals such as horses and mules; if they couldn't’t use those, they simply did all the planting and harvesting by hand. Even though farming at that time was essential and necessary, it took a great deal of time and strain. If the crops were not harvested in time before winter, or if the seeds were planted too late then all the work that had gone into farming the crops would have been wasted and starvation ensued. Therefore, the farmers had to perfect their farming techniques so that they could get the best results out of their crops. Several new inventions were made over time that improved the quality of the harvesting, planting, and other farm-based jobs. |
SUMERIAN HARVESTER'S SICKLE Image from: http://en.wikipedia.org/wiki/Sickle |
In the 1790’s, the cradle and the scythe were invented. The grain cradle was a scythe with four wood fingers that gathered the grain while it was being cut by an iron blade [5]. The scythe was a tool with a long metal blade used to cut and harvest crops; it resembled a hooked blade on the end of a long wooden pole [6]. |
The very beginnings of automation:
In the year of 1793, the invention of the cotton gin by Eli Whitney was introduced. It was a machine that quickly and easily separate the cotton fibbers from the seedpods and/or sticky seeds. The cotton was pulled through a wire screen by small wire hooks, and brushes and continually removed loose cotton lint to prevent jamming. This machine was automatic but could not think on its own.
 |
 |
| AN ORIGINAL COTTONG GIN DESIGN | THE MODERN COTTON GIN |
| Both images from: http://en.wikipedia.org/wiki/Cotton_gin | |
Then, in the 1800’s, several more inventions came into being: Charles Newbold patented the first cast-iron plow; the reaper was patented, and the plow with steel blades was manufactured. These new inventions, made by ahead-of-their-time people, made farming and other jobs easier and less strenuous on the farmers, who, before them, had to do all the work themselves thus work for the farmers was once again reduced [7].
Butter was a staple food in meals, but to make it, farmers had to plunge the dasher up and down in the butter churn for many hours. However, the invention of the cream separator in 1877 by Carl Gustat de Laval of Sweden really changed things in our lives. By turning the crank in the separator for one single hour, you could extract all the cream from 150 pounds of milk [8]! Carl Gustat de Laval was also responsible for inventing a machine that automated the task of milking cows, thereby allowing farmers to produce more milk than before [8].
All throughout the next few years, new inventions poured in, all the way until the present times, where we now have tractors, large combines and watering systems, far different than what it was years ago. However, as advanced as these machines were, they are not true robots, they cannot think and act on their own and modern farms still require a large labor force in order to produce food for the worlds population. These machines and labor cost the farmer money. Only in recent years have great strides been made towards automating farming and agriculture.
Modern Automation:
This section will detail a few current lines of research in robotic agriculture:
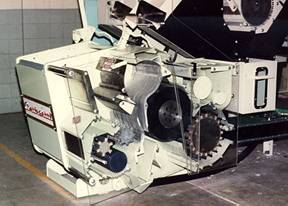
Image from [16] |
Demeter Demeter is a robotic harvester currently being developed to assist in large scale harvesting. Currently the robot has two modes of operation, but is not completely autonomous yet. In the future the robot will be able to harvest fields of grain on its own after being trained by its operator. The robot uses "off the shelf" parts to attain a guidance accuracy of +/- 3cm. [16] |

Mushroom Picking Robot:
Another type of robot made by the researchers of Warwick in the UK in the agricultural community is the Mushroom Picking Robot, which has a camera that can find the best looking and healthiest mushrooms to pick. Though it can only work half as fast as a human, it can work all through the night [20].
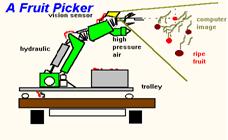
Fruit Picking Robot Another robot is the fruit picking robot, which must be able to reach all levels of a tree and be able to pick fruit w/out damaging it. The robot must have good sensory awareness—touch, sight, and image processing, and able to distinguish between certain fruits (plums: softer; oranges: harder rind) [19]. The robot uses a camera to tell the difference between fruit and leaves and has a air blower to blow leaves out of the way. |
Image from http://kernow.curtin.edu.au/www/Agrirobot1/frutrob.htm |
{kind=link}
Sheep Shearing Robot
The Sheep Shearer Robot is another robot, distributed rather frequently around sheep farms. The robot restrains the sheep firmly by the legs, while an arm that can rotate like a human limb with a shearer attached to one end lowers and shears the sheep, staying about an inch or so above the skin. (#18)
Ag Ant
University of Illinois at Urbana-Champaign developed a robot (“Ag Ants”) that walks on its spider-like legs through the rows of crops; when one detects weeds or other plants that should not be growing in that area, its calls in other robots to “attack” them as a team. The UIUC has also developed many other robots, such as one that can measure the distance between corn stalks.
The long-term goal is to be able to make these smaller, more inexpensive robots do the jobs of the larger farming equipment.
Quote from one of the Illinois agricultural engineer: “We're thinking about building 10 or more of these robots and making an ecosystem out of them,” Grift said. “If you look at bees, they will go out and find nectar somewhere. Then a bee will go back and share this with the group and the whole group will collect the food. Similarly, one robot might find weed plants. Then it would communicate this location to the other robots and they would attack the plants together as a group–an ecosystem, if you will.” Grift wants to live long enough to be able to see an entire farm run entirely by robots, though right now they are still focusing on navigation skills [17].