
Below is a interactive model of our proposed Aitken Basin Lunar Rover. Please be patient while it loads (and feel free to continue reading the rest of this page while it does). To fully experience this interactive model, be sure to view it in both color and wire frame. Spin the model with the buttons in the upper-right, and check out the labels to identify each part of the robot.
The Macromedia Flash Player plug-in is required for viewing. If you don't already have it (most browsers do), see the link below.
![]()
This is an interactive model of the proposed Aitken Basin Lunar Rover. It was modeled and designed entirely by the Botball team. If for some reason your browser does not support the Flash player plug-in or you are not able to obtain it, three sample pictures of the robot may be found here: robot, robot-in-wireframe, and robot-with-labels. Please view these pictures at their maximum size -- 1024 x 768 pixels -- to fully appreciate the resolution. (Many browsers will automatically reduce the picture to fit the monitor or browser window, but necessary lines in the image will disappear at this lower resolution.)
A nuclear battery (radioisotope battery) will provide power for our robot. This battery would be located near the center of main body of the robot, which would also serve as the robot's brain (computer hardware outfitted with navigation, communication, and water-detecting software). Its scientific and exploration instruments include a panoramic camera, stereoscopic vision cameras, high-gain and low-gain antenna, and a robotic arm outfitted with an ultrasonic drill and neutron/alpha-ray spectrometer. The robot in its entirety would be about the size of a very large dog.
The robot will roam around the surface of the moon on eight adaptable wheels (four on each side). These wheels will have treads, increasing traction on potentially rocky and steep surfaces of the 12-km-deep basin. However, each wheel will be able to move independently: the pieces which connect each wheel to the main body may move up and down on tracks and also rotate. This will enable the robot to lift some wheels higher and lower others, giving it the ability to rise above difficult obstacles and also conform to the possibly awkward surfaces of the moon. By providing each wheel full range of motion, the wheels will be able to stay in their vertically-flexible treads without stretching them. To maneuver over ridges, the robot may lift up its two front wheels and move them over the ridge, followed by the next three lateral pairs of wheels until the whole robot has climbed (or descended) the ridge.
The proposed Aitken Basin Lunar Rover also includes a large back/front wheel with two long arms attaching it to both sides of the main body and enabling the wheel to swing over the top of the body and onto the front or back of the robot. The main purpose of this wheel is to act as a stabilizer for when the robot is traveling down steep inclines: with a large, high-traction wheel positioned far in front of the robot, the slightly top-heavy body is less likely to flip over. When positioned in back, the wheel supports the other wheels and provides power.
The robot is designed for maximum maneuverability and is unlikely to become stuck in an immobile position.
The robot's "vision" will be it's rotating "pancam" (similar to the one on the MER robot) and stereoscopic vision cameras. The pancam is a panoramic camera, which lets the robot see a 360 degree view of its surroundings. The wide-angle near-infrared stereoscopic camera pairs allow the robot to compare the two side-by-side images of the lunar landscape to calculate distance to various points in its surroundings (there is a pair of cameras placed on the front and back of the robot, as well as hanging directly under the robot) . The near-infrared electromagnetic waves are a slightly lower frequency than the visible light spectrum, and will allow increased visibility in the darkness. Information indicating where ice lies in or on the surface of the Aitken Basin (obtained by the Lunar Prospector Mission) will act as a general guide for the robot. See searching for water for more information.
The robot would avoid routes causing extended communication blackouts with Earth due to the moon's tilt and rotation. The robot has high-gain and low-gain antenna for sending and receiving signals on the Deep Space Network (DSN). There is an approximate 1.5 second delay in communication to the moon, so scientists on Earth would be able to manually control the robot. If the robot is positioned in the few places on the south pole Aitken Basin where direct contact is not possible, the communications would need to be relayed through a satellite or the robot would act on automated software (or remain still until radio contact was regained).
A sustainable power source in the darkness and depth of the Aitken Basin is the most difficult problem facing the robot. The typical power sources available on Earth such as coal, wind, and water power are not available. The solar power available to other space robots such as the MER on Mars is not accessible in the lunar mission to the Aitken basin on the far side of the moon. Therefore, our robot design uses a new kind of energy source, a nuclear battery.
The battery creates power using the radioactive decay of the gas tritium which is a radioactive form of hydrogen. When the tritium decays, electrons are emitted outwards. A silicon wafer then catches the electrons to create electricity. When put into a circuit, the flow of the electrons from the silicon wafer to a positive ion is the electricity. This process is called betavoltaics. Until recently, the energy output from betavoltaics couldn’t match the other big power sources because during nuclear decay, the particles shot out in all directions. By punching small deep pits into the silicon wafer, which increased the surface area of the silicon wafer, the wafer was able to collect more electrons than previous attempts and increased the output of the battery. This creates a method which safely harnesses nuclear decay as an energy source ("New Battery...", 2005).
The benefits of this new form of energy are substantial for our robot. One, it is a form that can be used in the dark and cold depths of the lunar Aitken Basin. Two, it will sustain itself for up to a decade of continual use. And lastly, it is somewhat portable and easy to store on our robot, as a single battery is only slightly larger than a soda can.
The existence of ice on the moon is scientifically proven, but how can we detect and extract this essential compound from the lunar mantle? A NASA press release on March 5, 1998 stated that there is, “a high probability that water ice exists at both the North and south poles of the Moon, according to initial scientific data returned by NASA's Lunar Prospector.” (Isbell, 1998) The Lunar prospector was a project launched on January 7, 1998 which was designed for a low polar orbit investigation of the moon, including mapping of surface composition and possible polar ice deposits, measurements of magnetic and gravity fields, and study of lunar outgassing events. (Williams, 2005) The second, and most recent, press release on September 3, 1998, stated that, “The north and south poles of the Moon may contain up to six billion metric tons of water ice, a more than ten-fold increase over previous estimates, according to scientists working with data from NASA's Lunar Prospector mission.” (Isbell, 1998) Based on the data from the lunar prospector, NASA has determined the paramount means of locating water on the lunar surface.
The prospector project itself contains several important pieces of equipment that would work well on a robot searching for the water deposits in the Aitken Basin. The most important of these is the Lunar Prospector Neutron Spectrometer (NS). The NS is designed to locate small amounts of hydrogen that may exist on the moon’s surface. The hydrogen is an excellent indicator for water because only deposits of water on the moon would contain this element. The NS can detect a level of water ice at 0.01%. Additionally, the NS can be used to, “map Gd+Sm abundance through detection of anomalous reductions in leakage fluxes of thermal neutrons.” (Williams, 2005) In order to achieve this, the device must be capable of detecting levels of thermal, epithermal, and fast neutrons. The main function of the NS system is to locate water ice on or near the moon’s surface.
The physical characteristics of the NS also make it a likely candidate for robot use. It is a thin cylindrical tube with a mass of only 3.9kg. It contains an Alpha particle spectrometer at one end, which has a surface resolution of 150km. The NS will examine the poles at 80 degrees latitude with a sensitivity of at least 10ppm of hydrogen. The NS also consists of two cylindrical canisters, helium-3 gas proportional counters, one of which is wrapped in tin and one of which is wrapped in cadmium. The cadmium canister detects free thermal neutrons with low energies, but the tin canister does not. The differences in the thermal neutron counts of the two canisters reflect the hydrogen concentration of the lunar landscape (Williams, 2005).
A diagram of the NS is shown below. This critical device is ideal for the robotic search for ice deposits on the lunar surface. At the end of its robotic arm, the proposed Aitken Basin Lunar Rover has an ultrasonic drill, a neutron spectrometer (with an alpha-ray spectrometer), and microscopic imager. The neutron and alpha-ray spectrometer could detect the hydrogen contents indicative of water ice.
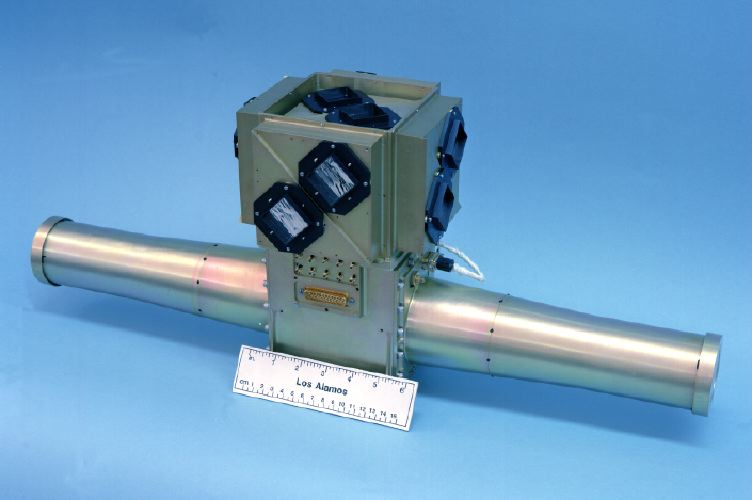
This is the neutron spectrometer coupled with the alpha-ray spectrometer. Click here for a larger view. This spectrometer can also be seen on the interactive model of our robot. (The image was retrieved from http://nssdc.gsfc.nasa.gov/database/MasterCatalog?sc=1998-001A&ex=2, courtesy NASA.)

Above: the "Ultrasonic/Sonic Driller/Corer," or ultrasonic drill. Click here for a larger view. This drill requires a low axial-load, and as can be seen, very little pressure is needed to hold the drill down: the drill is well-suited for the low-gravity environment of the moon. This drill may also be seen on the interactive model of our robot. (The image was retrieved from http://ndeaa.jpl.nasa.gov/nasa-nde/usdc/usdc.htm, courtesy NASA.)
The ultrasonic drill, called an "Ultrasonic/Sonic Driller/Corer," was recently developed in conjunction with NASA and is capable of drilling small holes to extract core samples. It is pictured above. The drill contains piezoelectric material which makes vibrations, in turn moving the drill bit up and down. This particular drill type was chosen because of its lightness, the relatively low amount of power required, and low amount of pressure needed to hold the drill in place as it drills. In experiments, the drill was able to create holes up to 14 cm deep. The ultrasonic drill is also capable of self-removal of the debris made as it bores the holes (Bar-Cohen, 2002). This way, when the Aitken Basin Lunar Rover's spectrometers indicate that there is water ice in a certain location, the ice, likely close to the surface, may be "dug up."
Then, the robot would use its microscopic imager, similar to the one used by the MER robots. Note that the camera itself is quite small and is not seen on the interactive model but would be placed on the robotic arm, by the ultrasonic drill and spectrometers. The imager would be able to take considerably magnified images of the debris to visually detect miniscule ice bits, verifying the findings of the spectrometers.
Coupled with the NS will be a high-powered computer system programmed to redirect the robot to that region which is most likely to contain ice based upon several factors. These factors include the following (prioritized from highest to lowest): the NS data, NASA’s topographical and thermal maps of the Aitken Basin, and human manual control of the robot. Manual human override would remain supreme, although it would most likely be rarely used unless new and relevant information turned up during the project. The system would have to contain a link to NASA and a fast enough processor to handle large amounts of data and transfer that data into robotic movement. This feat could easily be achieved through NASA funding and work with several hardware systems companies.
The NS system coupled with a high-powered computer would be ideal for locating deposits of ice on the moons surface. The NS system, run and organized by the computer, would receive and interpret data concerning the amount of hydrogen within the moon’s mantle and atmosphere. Based on this information and previous NASA mapping, the robot would search the most likely locations first, never searching the same region twice. The robot would easily detect and locate deposits of ice in the moon’s Aitken Basin.

