Lunar Exploration
Introduction
Lunar Terrain and the MER Robots
Our Team Designs
Bibliography
Back To Team's Public Website




Lunar Exploration
Introduction
|
|
|
|
|
|
|
|
|
|
|
|
|
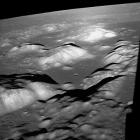
The Moon and Mars are very different in atmospheric content and pressure, gravity, soil content,
distance from the Sun and Earth, climate, and temperature. The geography of Mars and the Moon are similar enough that the
MER robots could be recycled for economic purposes for use on the Moon, with some added modifications. The temperature of
the moon has a greater range, 100°F to 250°F, where as the MER robots are designed for temperatures less than 10°F.
A modification to the heat shielding around the robots would have to be made. The Moon has hardly any atmosphere,
which makes it impossible to recreate it using any vacuum chambers on Earth. The lack of atmosphere would create problems
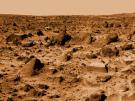
if the exact MER robots were used. Mars has an atmosphere composed of carbon dioxide, which has been used to slow the
descent of the MER robots landing on Mars. In order to slow the moon robots jets would have to be used to counteract the
pulling forces. The Lunar climate is much more forgiving than its Martian counterpart.
On Mars there are sandstorms that pose a threat to the robots. The biggest threat posed on the moon is asteroid impacts
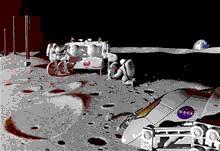
because of the lack of atmosphere. It is better for robots to be in the danger of impacts while humans stay in their
moon colony. In order to establish the moon colony we would use the same technology from the space station. This method of
recycling technology will keep costs lower. Anchoring the facility will require holes to be drilled into the soft powder
to get to a firmer foundation, which can be done by new pre-colonization robots with big drills. Once anchored the facility
will grow with attachments added on later just like the space station. Robots will handle any particularly dangerous
mission such as searching for water on the surface. The closer proximity of the moon to the sun will provide more
solar energy to fuel all activities. A modification to the MER robots that isn’t necessary but would be a good feature
would be recharging ports.
Robotics Club 2006 |
 The close proximity of the Moon to the Earth would also make it more economical to send
samples back to Earth, by a small rocket, for further studying. This would facilitate a need for another change to the
MER robots. Instead of drilling holes in rocks and analyzing them then and there a Moon robot would scoop up the sample
and bring it back to the moon colony so it can be analyzed there or sent back to Earth. The robots could be controlled either
by the moon colony, here on Earth, they could be fully autonomous, or a mixture of the three. There are advantages and disadvantages to
each method. The robots being controlled by the moon colony would provide the most synergy between the colony and the
robots that collect their samples. This method would distract the colonizers from important experiments done inside the
colony and would require specialized training. Controlling the robots from Earth would be easier than the
MER robots because there is less travel time between commands being sent and the action being completed.
The specialists would stay on Earth and not require astronaut training. Some sort of autonomy should be employed so that
the robots don’t need to rely on humans. Robots can handle obstacle avoidance and should eventually be able to find colder
areas for any sign of water. These cooler areas are where the sun does not hit the surface which would be in basins such
as the Aiken Basin. The robots are going to need to be able to go into the basins and climb over rocks so they should have treads
instead of wheels. This will help the robots with being autonomous for they won't get stuck on small obstacles that would
otherwise get caught between the wheels.
The close proximity of the Moon to the Earth would also make it more economical to send
samples back to Earth, by a small rocket, for further studying. This would facilitate a need for another change to the
MER robots. Instead of drilling holes in rocks and analyzing them then and there a Moon robot would scoop up the sample
and bring it back to the moon colony so it can be analyzed there or sent back to Earth. The robots could be controlled either
by the moon colony, here on Earth, they could be fully autonomous, or a mixture of the three. There are advantages and disadvantages to
each method. The robots being controlled by the moon colony would provide the most synergy between the colony and the
robots that collect their samples. This method would distract the colonizers from important experiments done inside the
colony and would require specialized training. Controlling the robots from Earth would be easier than the
MER robots because there is less travel time between commands being sent and the action being completed.
The specialists would stay on Earth and not require astronaut training. Some sort of autonomy should be employed so that
the robots don’t need to rely on humans. Robots can handle obstacle avoidance and should eventually be able to find colder
areas for any sign of water. These cooler areas are where the sun does not hit the surface which would be in basins such
as the Aiken Basin. The robots are going to need to be able to go into the basins and climb over rocks so they should have treads
instead of wheels. This will help the robots with being autonomous for they won't get stuck on small obstacles that would
otherwise get caught between the wheels.