|
|
Our Team Designs
Redding, CA - Robotics Club
Team #06-0028 |
|

Once our team's research was done, the following robots were designed by team members to address the elements they felt were important in finding water in the Aiken Basin.
Mootian Lander
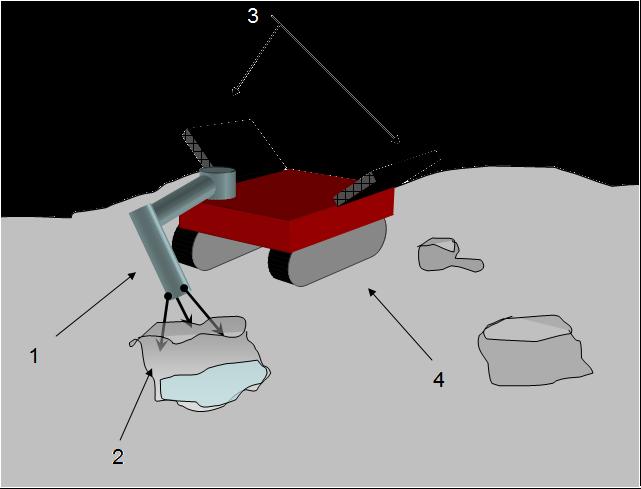
1.) Arm to move the fingers
2.)Fingers, Digs down to 10ft. Then the fingers use there sensors to detect water molecules.
3.) Solar panels for energy.
4.)Tank like treds for easy mobility.
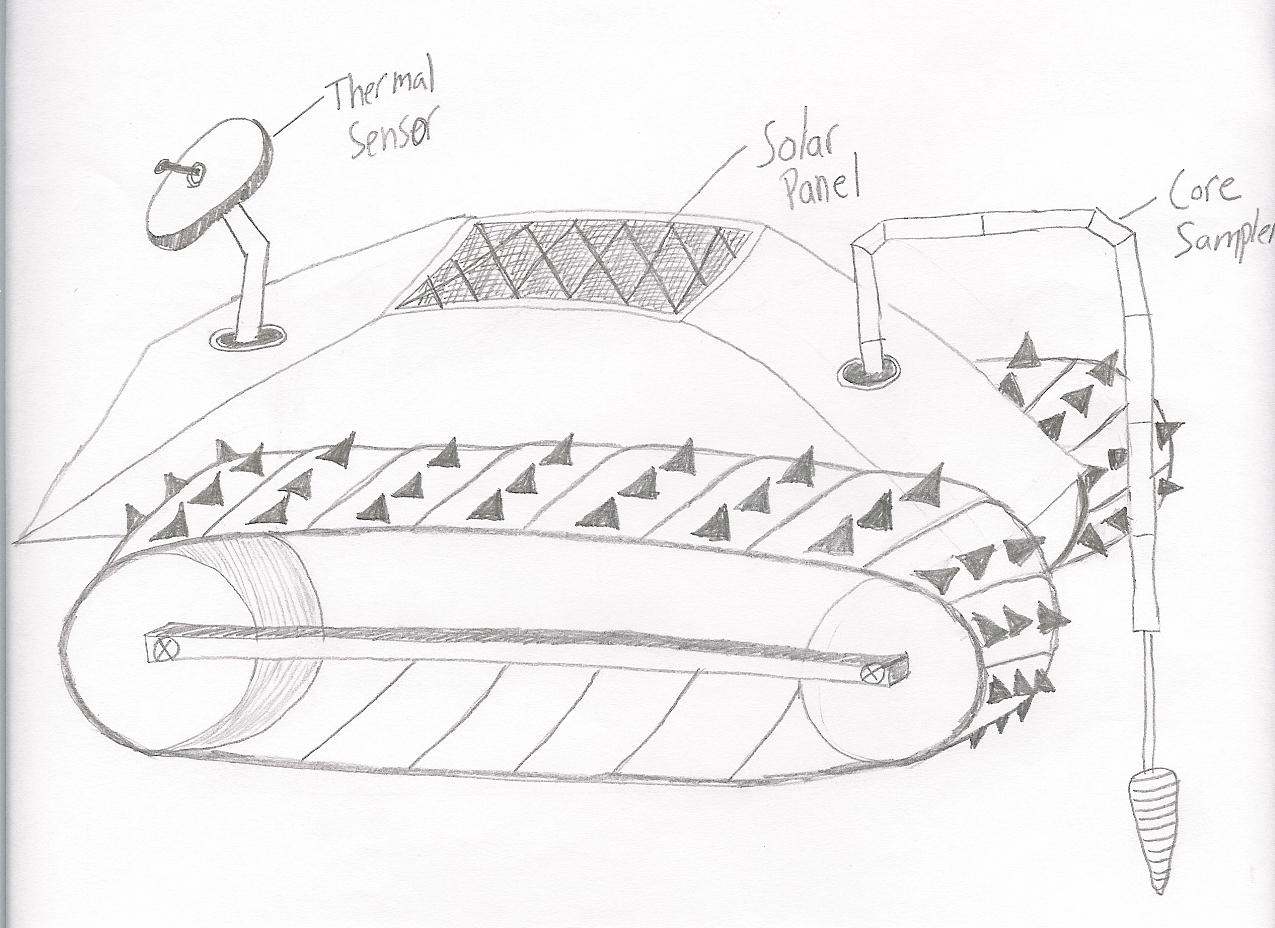
Core DiggerThe robot will be mobilized by tread that is similar to a bulldozers. It will be powered by solar panels. It will require a 60 minute charging period for every 120 minutes of operation. The robot will do a thermal scan every 30 seconds. The scan will have a radius of 700 feet. The robot will move towards the directions that range in temperatures of 40F to -50F. When the robot reaches the area with low temperature it will take a core sample every 4 feet. It will then heat the sample to 90F and test for water molecules.
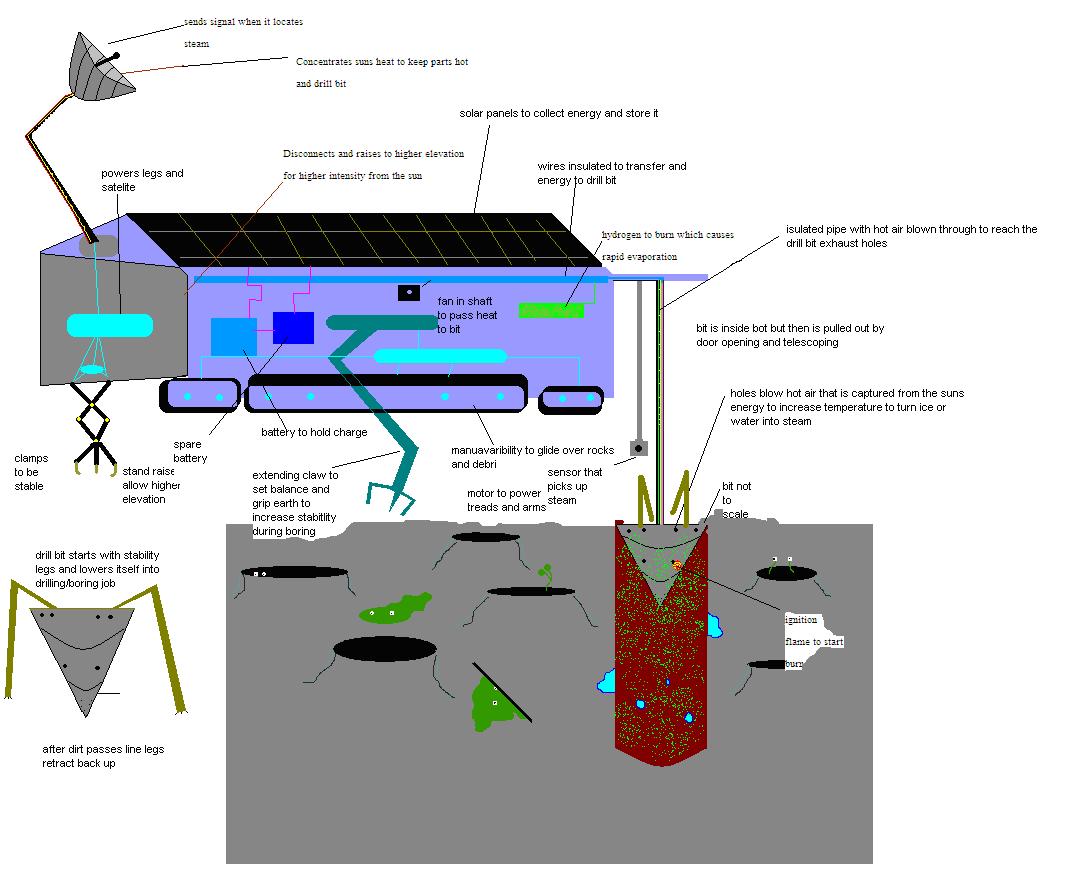
The LEAD
(Lunar Exploration Aqua Digger)
This machine will be used to search for water in the moon surface. It will run on solar power and have an extra battery to hold a charge in case of emergency. It will use satellite to broadcast it has detected water in a steam form. The back end of the robot will be able to deploy raise up to receive better frequency and allow for a higher concentration of heat from the sun. The way of its transportation will be the use of treads. These will allow for stability and maneuverability in and out of dips. It will also be used to concentrate the suns heat to keep the parts warm and to heat up the drill bit. It moves on three sets of treads and uses clamps to be stable. There will also be a set of leg clamps that will help stabilize the whole machine to keep the bit from breaking and from degrading the moons surface to badly. These will be used to help stabilize the bit as it goes into the crust. It will use a drill bit to bore into the moons crust. It will have legs connected to the upper layer of the drill bit. As it bores into the crust the legs will detract back onto the drill. It will bore about six feet into the crust and pulls back to the moons surface to create an air tight seal. The L.E.A.D. robot will then deploy a hydrogen gas that will fill the chamber and then ignite the hydrogen with a flame. The combustion will heat up the water or ice into a steam form any steam that leaks from the seal will be detected with sensors. Then the drill bit will pull up and secure itself back to the beam.
Return to Top of Page
Redding, California
Robotics Club
2006
|







