|
Purpose: This page will give the reader a history of lunar missions and compare those missions to recent Martian missions and show the reader why we cannot simply place one of NASA's very successful Martian rovers on the moon.
The Soviet Luna Missions [11]
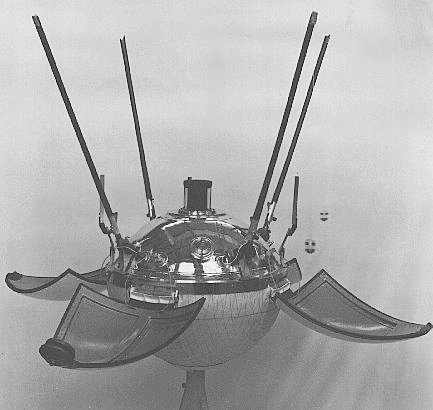
Lunar rovers have been sent to the moon since the late 1960's. These missions paved the way for lunar exploration and helped to answer many questions and solve many problems involving lunar exploration. One of the first so-called 'rovers' was the Luna 9, launched by the Soviet Union on January 31, 1966[18]. It was a satellite that made a soft landing on the moon on February 3, 1966 and sent back several pictures before its batteries died. Luna 9 was the very first spacecraft to make a soft landing on the moon[18]. Luna 9 was not a rover but instead stayed in place and sent pictures and TV transmissions back to the Earth. Luna 9 proved that it was possible to make a soft landing on the moon and send data back to the Earth. A picture of the Luna 9 landing module appears below, this image was taken from: http://en.wikipedia.org/wiki/Luna_9
There were 8 previous Luna missions, those that were designed to land on the moon either violently impacted the moons surface or were off course[11]. The Luna 1 mission was the first spacecraft to escape Earths gravity and reach the moon[19] and Luna 2 was the first spacecraft to image the dark side of the moon[20].
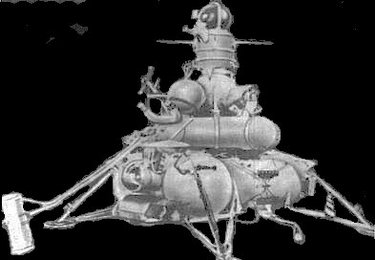
Luna mission 13 also landed on the moon[21]. Luna mission 14 was designed to land on the moon and return soil samples back to the Earth. Luna 14 was destroyed when it impacted the moons surface at a high velocity[21]. Luna 15 was a similar mission and was a success. It was the very first unmanned robotic probe sent to the moon that collected soil samples and returned them to the Earth[21]. The probe returned 101 grams of lunar soil back to the Earth[21]. A picture of the Luna 16 module appears below. This image is from: http://en.wikipedia.org/wiki/Luna_16
The first 16 (out of 24 total) Luna missions were not true rovers in that they did not actually roam around the surface of the moon. However, the Soviet Luna missions paved the way for truly robotic exploration of the moon by solving many of the technical and logistical problems associated with getting to and landing on the moon without human help. Luna 17 which was launched in November of 1970 was a milestone mission because it carried with it the first true unmanned rover to reach the moon, the lunakhod rovers[22].
The Lunakhod rovers[13]
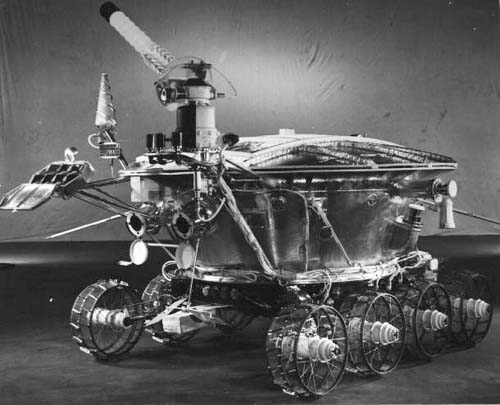
The first actual lunar rover was sent up by the USSR in 1970 and was called the Luna 17[22]. The Luna 17 landed in the Mare Imbrium, a large area in the moon's northern hemisphere. Soon after it landed, it sent out the Lunakhod 1, a small wheeled rover that was designed to collect soil samples and analyze density and composition of the samples.
The Lunakhod 1 weighed 838 kilograms and was 1.5x1.5 meters long[13]. It had 8 wheels and could travel 1-2 kilometers/hour[13]. It had two antennas, four television cameras, an x-ray spectrometer, an x-ray telescope, cosmic-ray detectors, and a laser device. It was powered by a solar cell array mounted inside the "lid," and it had a radioactive heat source to retain heat during the lunar night[13]. It operated for 4 months and traveled approximately 35 kilometers, took more than 20,000 TV pictures, 200 TV panoramas, and more than 500 soil tests[13].
Several years after the Lunakhod 1, on January 8, 1973, the Soviets sent up the Lunakhod 2, also known as the Luna 21 mission[22]. The Lunakhod 2 was very similar to its predecessor, Lunakhod 1. It stood about 1.5 meters high and weighed 840 kilograms[22]. Its sensors included a soil mechanics tester, x-ray equipment, an astrophotometer to measure light, a magnetometer, a radiometer and a laser corner-reflector supplied by the French[22]. The Lunakhod was controlled by a 5-man team on earth, which sent it commands in real-time. While on the moon, it took 80,000 TV pictures, 86 panoramic images, and traveled 37 kilometers[22].
Mars Rovers and Why We Cannot Use Them on the Moon
There were many missions to Mars before true rovers were sent to inspect the planet. The Soviet Union launched a series of missions to inspect Mars in the 1960s and even included two Martian rovers. These missions were failures and the spacecraft either ended up impacting the surface or failed on the surface[14]. The United States sent the Viking One and Viking Two landers to land on the surface and send back pictures and other data. The first true unmanned rover was the Mars Pathfinder mission. [14]
Mars Pathfinder [15]
The Martian rovers were sent so we could find out more about the planet Mars. The first rover was carried by the Mars Pathfinder, launched in December 1996[15]. It arrived on Mars by July 1997. The rover's name was Sojourner, and it weighed 10.5 kilograms[15]. The rover had a rectangular top made of solar panels which powered it, and it had six wheels to move across the Martian surface. It was controlled by an Earth-based operator but there was a 10-minute time delay for the commands to go from Earth to Mars[15]. Sojourner's job was mainly to show how cheap it was to land and explore the Martian surface, but it had another job. It took pictures of the Martian surface so that we could plan later missions. NASA later lost contact with Sojourner on September 27, 1997. [15]
 |
 |
The Sojourner climbing a hill.
Image from: http://nssdc.gsfc.nasa.gov/planetary/mesur.html |
Sojouner and lander
Image from: http://en.wikipedia.org/wiki/Image:Lander_and_rover_drawing_lmb.jpg |
Spirit and Opportunity [16]
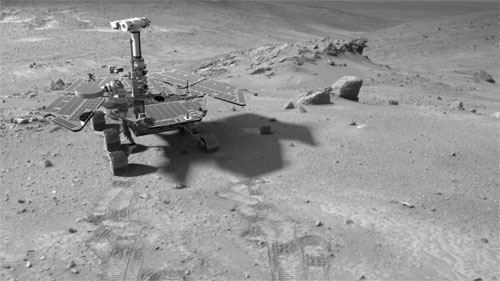
The next Mars rovers were Spirit and Opportunity which landed on Mars in 2004[16]. Their tops were covered in solar panels to power the rovers. Both had six wheels to move across the Martian surface[16]. Once on Mars, the two rovers' jobs were to determine if there was ever life on Mars, to characterize the climate of Mars, to characterize the geology of Mars, and to prepare for the human exploration of Mars. Spirit and Opportunity both were preprogrammed to go and do the jobs mentioned above, but if NASA saw something in one of the pictures the rovers sent back NASA, the earth-based programmers could send a new program to investigate that area. Since the rovers were mostly autonomous, they had navigational cameras to wander around Mars without falling off a cliff or crashing into a rock. Spirit and Opportunity also had sensors and tools to help carry out their missions such as tools to break down rocks and test them for the presence of water. All of these sensors and tools had to work together to be able to complete the task at hand.[16]
After Spirit and Opportunity, more Mars rovers will help search for life on Mars. These rovers will help to prepare for humans to land on Mars, like the Italian Space Agency's future Mars rover, "Phoenix," to study the surface and near-surface environment of a landing site in the high-northern latitudes of Mars. As for now, all we can do is wait to see what comes next.
Differences
The Martian rover missions are similar to what we want to accomplish with our lunar rover mission. The Martian rover missions were sent to find evidence of water on Mars and to explore the Martian geography. Our lunar roving mission has a similar mission; however, we cannot just send a Martian rover to the moon for the following reasons:
- Mars has an atmosphere which helps to regulate its temperature and the moon does not. Our lunar rover must be able to deal with extreme temperatures. The temperature at the south pole can reach -233C which would quickly freeze the Martian rovers as they are not equipped to deal with such extremely cold temperatures.
- The terrain on which the rovers must operate is very different. The Martian surface is relatively smooth with large rocks strewn about the surface as can be seen in the above photograph. The lunar surface is scared and rough and full of craters and valleys. The Martian rovers would be unable to deal with the extremely rocky terrain.
- The Martian rovers were landed with an innovative air-bag deployment system in which the rover bounced around the surface eventually coming to a stop and the air bags would deflate and the rover would deploy. Because the lunar surface is so much rougher this type of landing could easily result in a popped airbag or the rover getting stuck in a valley or cranny on the moon.
- The Martian rovers had to deal with extremely long communication delays with the Earth and hence its control system is very sophisticated. A lunar rover has a very small communication delay and can therefore be remotely controlled although our rover will be as autonomous as possible.
- The Martian rovers received their power via solar cells. Our lunar rovers will be traveling to an area of the moon that receives no sunlight and therefore cannot recharge their batteries via solar power.
|



{kind=link}
{kind=link}