|
Purpose: This page will present an original solution to the problem of searching for water ice on the moon.
What is Needed
An efficient rover design would be one that could travel over rough terrain and be able to test mineral samples for the presence of water. It would also require a way to send images back to Earth. The rocket, or any transportation from the earth, would not need as much fuel to get to the moon as the Martian rovers, since the moon is much closer to Earth than Mars. The rover will also have to be able to get energy besides having solar panels directly on the robot due to the fact that most of the basin is in perpetual darkness.
Our basic idea is a landing unit which contains a main rover and a number of small mini-rovers. The main lander will be autonomous and programmed to explore the lunar surface, sending information back to the lander for processing. The lander will dispatch mini-rovers to check interesting areas in greater depth.
Launch and Landing
The lunar rover will be launched from earth on a rocket similar to the MER rockets, but without as much fuel. Once in space, the rover module will separate from the main engines. When separated from the main rocket engines, the module will use its rockets to steer to the moon and start its orbit of the moon. After three orbits, the lander module will break away from the lunar orbiter and begin its descent.
The lander module will first fire stabilizer rockets so that the rover will be slowed down enough for a soft landing. Once down to the right speed, the lander will use the rest of the rocket's power to land similar to the Apollo 11 mission. Once on the ground, the lander will unfold from its cone shape into three sides with the rover in the middle. After the main lander has unfolded, another lander will unfold from the lunar module. This lander is used for the express purpose of carrying large flooded-lead acid batteries and will recharge any mini-rovers and the main lander that needs power.
Once the lander has rolled out the ramps for the rover to go down, the rover will unfold. Once unfolded, an antenna will come out of the rover and send a signal to Earth that it has landed. Now the main lander will then begin to roll down the ramp. The main rover will begin exploring autonomously taking pictures of the area, extracting rock and core samples, and testing for water.
Oncean interesting area is found, the lander will throw out smaller, spider-like rovers that will be able to cover more terrain than one rover. This will continue for a three- to four-week period. After the final week, the robot will shut down and be decommissioned. This will be the end of the robot's mission.
 |
The rocket design; similar to MER rovers
image taken from http://www.nasa.gov/centers/ames/news/releases/2004/mars/artwork.html |
Robot Design
Programming and Telemetry- The main rover will roam around and take samples along with taking photographs. If the rover picks up any interesting objects or places, a new program will be sent to the main lander which will assign 1-2 mini-rovers to investigate. All of the rovers will be completely autonomous and able to navigate and communicate on their own. The rover, mini rovers and lander will communicate with each other over a wireless network and be able to know the position and status of all componets in the mission. If a mini-rover breaks or is otherwise incapable of completing the mission another mini-rover can take up that rovers duties. In case it is needed all componets of the mission will be able to be remote controlled from Earth.
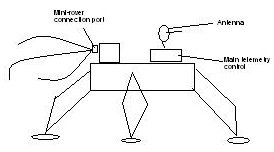 |
| The main lander |
Movement- To move around the basin, our mini-rovers will be powered by three motors. These motors will be moving six robotic legs that will allow for maximum capability of traversing the rough terrain of the moon. The legs will have two joints to bend and will be able to move 40 degrees in each direction. The main lander will be powered by two motors and use treads to crawl across the lunar surface.
 |
 |
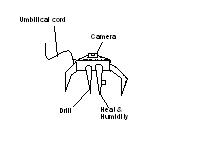
| Spider mini-rover from the side |
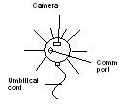
Top view of spider mini rover |
Power - The mini-rovers will not have on-board batteries, since they would need a large battery that would take up too much space and would be too heavy. Our solution is to have a separate lander that carries many 820-watt flooded lead acid batteries. These batteries will be connected to the mini-rovers via their umbilical cord, and they will continually drain power from the batteries so as not to run out of electricity in the middle of drilling.
 |
| The Recharge Lander |
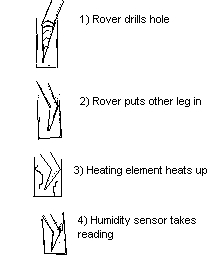
Water - For the rovers to confirm there is water in the basin, they will drill holes in the lunar surface utilizing a drill on the front right leg. After the hole is about 6-7 inches deep, the rover will put its front left leg in, which contains a heating element and a humidity sensor. The heating element will heat up the sides of the hole, hoping to melt any frozen water present, and take a reading from the humidity sensor.
 |
|
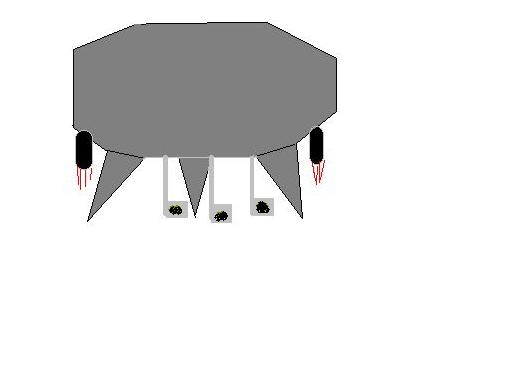
| Mini rover drilling for water |
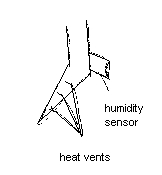
The heat vents on leg |
Problems – There are several problems with the mini-rovers. First of all, the mini-rover's cord could be cut or disabled. There is no real solution to this problem, except for carrying spare cord. The mini-rover would just use its remaining power to send its information back to earth using a backup communication antenna on the top of the mini-rover and then shut down. Another problem is instrument damage, as the rover has its drill and sensor on its legs. The solution is a metal cover over the leg instruments that would retract when the rover is ready to drill and would cover the drill and heat vents again when the rover is done. The last problem is the moon’s ambient humidity, which could mislead our humidity tests. The rover will solve this problem by taking a reading on the humidity sensor before it starts drilling, and will compare the before and after humidity readings to see if there is any difference.
|

