Team 06-0001

|
 |
Design Considerations:
When building a lunar rover, we have to consider the following items:
- The terrain of the moon makes it hard to explore. The moon has a very rocky, rigid terrain. We need to be able to navigate over rocks, through craters, and so on.
- We must be able to land inside the Aitken basin and the terrain of the moon will have a large impact on the landing method.
- The robots power source. The Aitken basin is shrouded in darkness 100% of the time, therefore solar power is not an option as it is when designing a Martian rover. Batteries will quickly die and will need a way to be recharged.
- We must be able to drill into the lunar surface and have a plan for detecting water.
- The control method of the rover is important, previous lunar rovers were nearly 100% remote control but in today's day and age we can use far more sophisticated means of control.
Landing the rover:
The Martian rovers were landed with an innovative system which deployed airbags around the landing vehicle and the landing vehicle was allowed to bounce randomly around the surface of Mars until it came to a stop, the air bags deflated and the rover was deployed. This method may not work on the moon as the terrain on the moon is far more rocky and dangerous than the relatively smooth Martian terrain. A lander allowed to land in such a way could easily bounce into a valley or crevice in which it could not be easily deployed, ruining the mission.
Our rover will be landed in a manner similar to the way the Apollo lunar landers were landed. A vehicle will fly towards the Aitken basin under computer control and select a smooth landing site based upon detailed photographs taken while the vehicle was in orbit. Under computer control the lander will then guide itself in and using various maneuvering jets and then slow its descent until it lands gently on the moon. The rover will then deploy from this location.
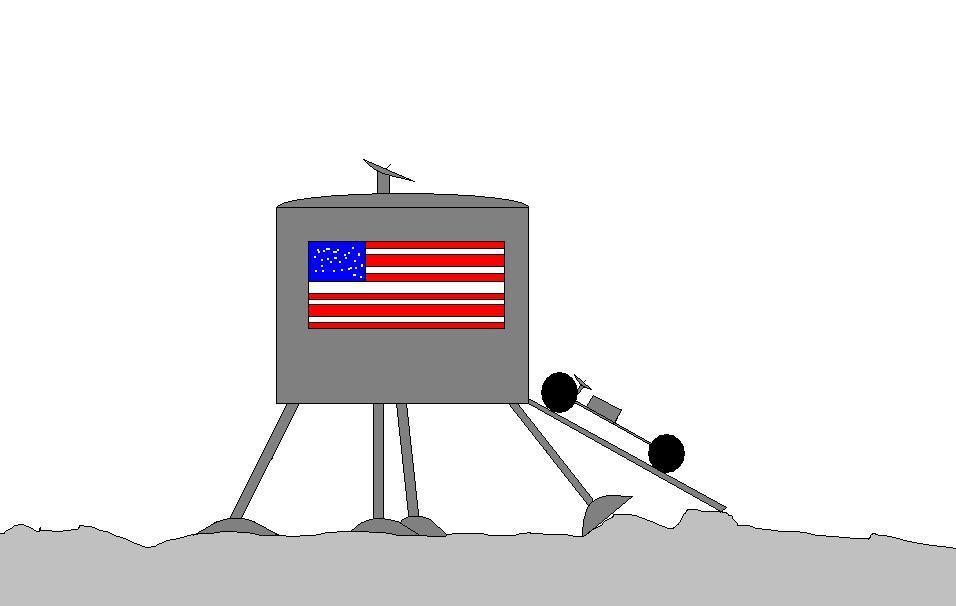
Power systems:
The Aitken basin is shrouded in 24 hour darkness, thereby limiting the use of solar cells that powered the Martian rovers. We came up with three different possible solutions to this problem.
1. An orbiting vehicle will carry "power packs" for the rover and when the rover is low on power these power packs will be deployed upon the surface for the rover to pick up and recharge itself.
2. On the outside of the Aitken basin a "hive" will be deployed with thousands of tiny, autonomous robots that sit in the sun recharging themselves. These thousands of small robots can then journey back and forth, delivering power to the rover. The hive robots will use the latest in swarm robot technology to communicate with each other and coordinate recharging efforts. We will use thousands of these small robots as we believe mortality rate among them may be high. When the hive has depleted itself through mortality a new hive can be sent and deployed.
3. A small pellet of plutonium in an atomic battery would constantly decay; putting out large amounts energy that otherwise wouldn’t be available. This power source will allow the rover to go into the Aitken Basin and keep running even if the sun's rays didn’t reach into the basin. Another side effect is that the heat generated could be used to keep the rover warm while in the basin.
Control Method:
Previous lunar rover missions have been mainly remote control operations. However, today's technology allows us to give our robot a large amount of intelligence and autonomy. Our robot will largely roam around on its own and will use a variety of sensors to collect information and report back to Earth its findings. If it finds something interesting at a location it will alert Earth and can be given instructions for further investigation from scientist here on Earth.
The rover will also be able to be operated in a number of remote control modes. Since the distance is not too great the robot could be driven directly though this would be difficult and rare. The other method of remote control would allow the robot to be given a series of instructions to carry out and the robot would carry out those instructions including avoiding obstacles along the way.
In this manner our rover would be nearly 100% autonomus and only remote controlled when necessary.
Finding Water:
We will accomplish the task of finding water on the moon by taking samples of the soil and heating it to see if steam is formed. If water is present in the soil, then the humidity and the pressure will rise inside of the collecting tube. This is a very long process because the rover will have to test many samples of the dirt on the moon.
Our search will begin in a crater in the south pole of the moon, the Aitken Basin. Our rover will search for water by means of a drilling arm. The arm will collect some of the lunar soil in predetermined areas of the basin and the sample will be tested.
The sample arm uses an auger drill to collect the sample. The sample will be put in a special chamber and heated to the boiling point of water. If there is any water in the soil it will be turned into steam. Then a humidity tester will be used to detect any change in the humidity of the sample. Below is a diagram of the arm and its most important component:
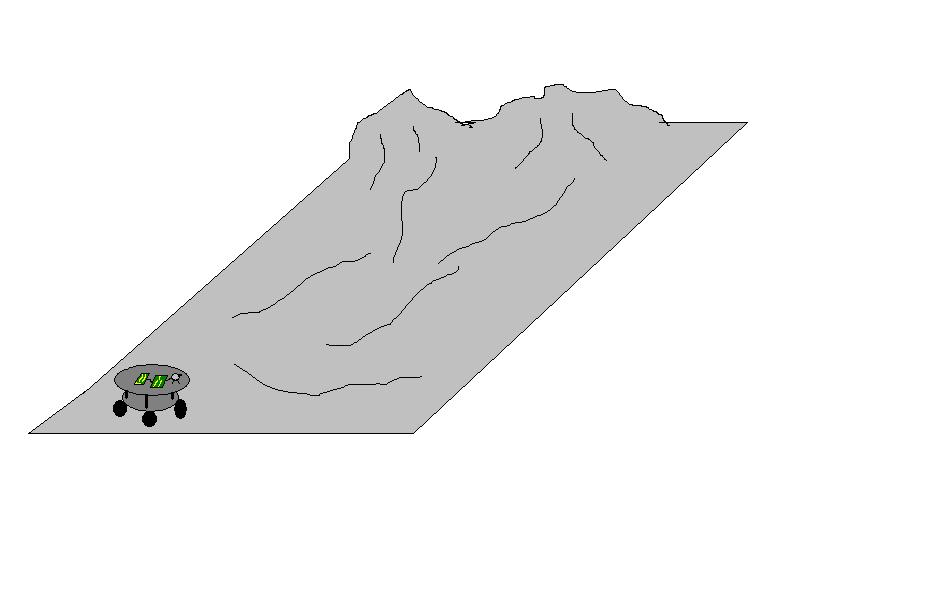
Locomotion and Sensors:
The actual rover will have a tungsten-steel alloy chassis so it will be heavy enough to have good traction on the moons low gravity. Earlier rovers had braking and turning problems because they were too light. The rover will be equipped with a high definition camera, a long range communication dish, and four, high traction, low pressure tires, the low pressure tires will help in gripping the moons surface. Below is a diagram of the rover:
Because of the cost of tungsten, the rover will be built using sort of a skeleton design. It will have a high speed processor to help it keep up with the constant data it’s being fed from Earth.
Getting there:
Our solution for getting to the moon is very simple. We will load the rover onto a rocket ship and shoot it at the moon. Below is a picture of the ship:
![]()
Image from: http://antwrp.gsfc.nasa.gov/apod/ap021023.html
The Perry Lunar Rover Project:
We are working on building a semiautonomous lunar roving vehicle capable of being controlled from anywhere in the world via a network connection. The robot is actually quite sophisticated and this is a very long term project at Perry which we hope to complete by the Botball National Conference.
Currently the robot consists of the following electronic parts:
- Via Epia MII 6000 Motherboard (Mini-ITX)
- 512 MB DDR RAM
- 1 GB Compact Flash card
- 40GB Hard drive (Dual booting Win XP and Linux)
- Logitech Quickcam 4000 Pro
- 90 Watt DC to DC Power supply
- Zagros Max '96 Round Robot Kit (16in diameter)
- 1 Phidget InterfaceKit 8/8/8
The rover that we are actually building is not as fancy as the one above, and will not actually go to the moon. Currently we are using a round base from Zagros robotics as a prototype platform just to get something going. However, later in the project we plan to build a complete metal base in the shape of our lunar rover above and include an actual apparatus to detect water in a soil sample. In all respects it will be very much like the rover we have designed above without actually going to the moon!
 |
 |
 |
 |
The rover will run the Linux operating system and will run a small server that streams video and sensor information. A client will be written that will run on Windows and Linux and the operator will connect to the client to view the rovers data in real time. The operator can then drive the rover around and the rover will act semiautonomous, avoiding obstacles and streaming information back to the operator.
Currently we have the electronics mounted on a mobile base that will serve as a prototype until we can build the actual aluminum frame. We hope to have something operational for the Oklahoma Regional in February with actual completion of the complete rover before the National Botball Conference.
It may eventually run on a simulated lunar surface that anyone in the world can drive our water searching lunar rover around, looking for water.