
Team 06-0001

|
 |
Lunar Roving History
Before we even started thinking about water on the moon, scientists at NASA planned other missions to the Moon as well as various planets. Unmanned rovers were sent to planets including Venus, Mars, Uranus, and Neptune. Several missions succeeded, but others failed, especially early on, teaching scientists what to avoid when launching rovers.
Famous launches such as the Apollo missions and the Sputnik satellites sent the world a message about exploration when they were successfully launched into space. They told the world that we were going to explore the moon, and our solar system, that man kind would expand from the Earth, even if people died on the way.
The Soviet Luna Missions [1]
The USSR's Luna (AKA Lunik) missions comprised the most obvious unmanned lunar rover program, taking place between 1959 and 1976. 24 probes were named as part of the Luna program, in addition to those that did not leave Earth orbit[1]. Fifteen of the missions were successful, and the other nine crashed into the moon or missed it completely. Luna 1 missed its landing, passing within 5995 kilometers of the moon's south pole on January 4, 1959, and ending up as the first spacecraft to orbit the sun[1]. The second probe, in a spherical shape similar to the first, landed on the moon on September 13, 1959. It discovered the lunar wind, something thought of only after the first mission. Luna 3 was shaped like a cylinder and took the first pictures of far side of the moon, sending back 17 pictures by October 18 and losing contact four days later. The fourth probe was the first not sent on a straight path to the moon, sent on a curved path after being in low Earth orbit. The next mission crashed into the moon in May of 1965. Luna 6 passed the moon on June 11 of that year as a result of human errors. Luna 7 lost altitude control and crashed into the moon on October 7 of 1965. The next mission crashed on December 6.
First Lunar Landing
Luna 9 was the first probe ever to soft-land on a foreign body, landing on the moon on February 3rd of 1966 [6]. It transmitted seven radio sessions, totaling eight hours and five minutes, and three sets of TV pictures. There were five panoramic pictures and four others, totaling nine. This 12th mission in the path of soft-landing on the moon was very important. It landed in the Ocean of Storms before losing contact on February 6th. [6]
The next Luna mission entered lunar orbit April 3, 1966, orbiting 460 times and transmitting data back to Earth 219 times before losing radio contact with the USSR on May 30. It was the moon's first artificial satellite. Lunas 11 and 12 orbited the moon, while 13 was the second soft-landing and Luna 14 orbited the moon. Luna 15 was supposed to bring back soil, but it crashed into the moon after Neil Armstrong and Buzz Aldrin walked on it, winning the race to place a man on the moon. The 16th mission declared part of the Luna program brought back 101 grams of lunar soil, the first of three lunar soil samples the USSR received. [7]
The First Unmanned Lunar Rover: Lunokhod 1 [9]
Luna 17 landed on the moon, carrying Lunokhod 1, the first lunar roving vehicle of the USSR. The next mission crashed into the moon.
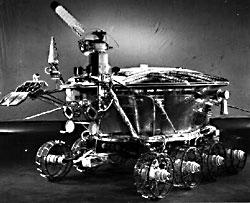 |
| Lunokhod 1. Image from http://en.wikipedia.org/wiki/Lunokhod_1 |
Lunokhod 1 was a tub shapped rover with eight wheels. The rover was equipped with four television cameras, a number of communication antennas and extendebale devices to test soil denisty and other lunar soil properties. Lunokhod 1 wasalso equipped with an x-ray spectrometer, an x-ray telescope and cosmic ray detectors. Lunokhod one was extremely sucessful, operating for 11 lunar days, travelling over 10,540 meters and sending back over 20,000 lunar images along with over 500 soil tests.[9]
Lunokhod 2 rode along in Luna mission 21 and landed on the moon on Janurary 15th, 1974. Lunokhod 2 was in many respects similar to its predecessor and operated for about four months and travelled over 37km. The unmanned rover sent back over 80,000 TV images and 80 panoramic images along with various soil tests. [10]
Luna 19 orbited the moon, while 20 brought back the second batch of soil. The 21st Luna landed on the moon, and the 22nd orbited, while the 24th (and last) brought back soil. [1]
The Apollo Manned Rovers
The Apollo rovers were manned vehicles used on the moon to further the distance that the astronauts traveled during their Extra Vehicular Activities (EVA's). The astronauts had a finite amount of oxygen and water in their PLSS (Portable Life Support System) units, so they could only travel so far. The rovers greatly extended this distance. [3]
Lunar Rovers vs. Martian Rovers
Lunar rovers are very different from Martian rovers. Lunar rovers, especially in the South Pole-Aiken Basin, need more insulation, a more reliable power source (other than solar power, since the Aiken Basin has 24 hours of darkness), need to be prepared for the many craters and ridges on the surface, and can be remote controlled. Martian rovers have to be mostly autonomous, don't need as much insulation, run on a smoother surface, and can run off solar power.
Lunar rovers also need to cope with the fact that the average temperature in the Aiken Basin is -220º Celsius, very close to absolute zero, where there is no movement of molecules. When it is that cold, objects become very brittle. The structure of a lunar rover intended to explore the Aiken Basin needs to have structural integrity, as well as a lot of insulation to protect the electronics.
The lighting, or in this case lack of it, in the Aiken Basin also needs to be taken into account. A lunar rover exploring the area could not run off solar power, because there is nothing to create solar power, since the sun doesn't ever reach the area. The area is very cold because the sun doesn't ever heat it up.
The terrain on the moon is also an issue. The moon has many bumps, ridges, and hills that the rover will need to navigate around. The rover will need to have many sensors designed to make sure it doesn't fall off a cliff or drive into a boulder. On Mars, however, the surface is relatively smooth, allowing for easier driving for the rover. The terrain also affects the landing system of the rover. Airbags wouldn't work too well on the moon, because the rover could easily bounce into a crater and get stuck. On Mars, airbags would probably work much better than on the moon.
The distance from the Earth also affects how the rover is built and controlled. Since the moon is close to the Earth, we can remote control the rover, relaying the signal from a satellite around the moon. We would only have a time delay of one to two seconds, making this plan feasible. On Mars, however, we would have to use a semi-autonomous rover, since there is an eight minute time delay- each way- making it sixteen minutes after you send the rover a signal to move one foot to the left that you find out it followed your command and fell into a crater.
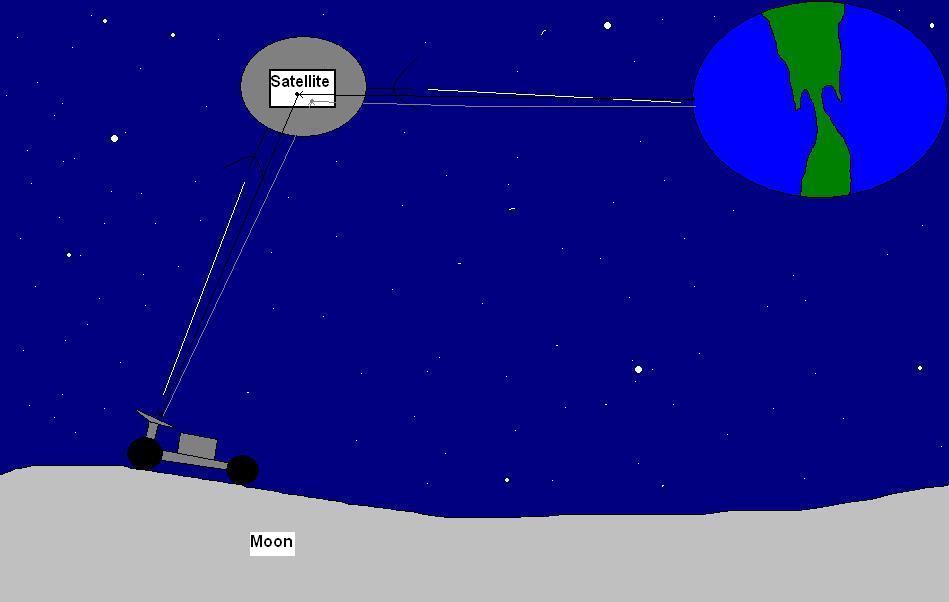
An artist depection of a satelliterelaying information from an lunar rover to the Earth.
One last major difference between a lunar rover and a martian rover is that a lunar rover needs to be much heavier, since the pull of gravity on the moon is much weaker than the pull of gravity on the Earth or Mars, and the rover could float away, without an atmosphere to even slow it down once it reached the moon's escape velocity.
Becasue of these differences we simply cannot take one of the cery sucessful Martian rovers and sens it to the moon. It would not be able to land, could not navigate the terrain, would freeze to death and would not have sufficient power to operate for an extended mission.