|
|
|
|
|
|
|
|
|
|
|
Innovations
to enable the blind to drive have branched out into two categories:
human-side and vehicle-side. On the human-side, much effort has gone into
developing an artificial eye, enabling the blind to engage in normal
activities including driving. While on the vehicle-side, research on a
semi-autonomous navigation system utilizing GPS, roadside sensors, and an
array of interface tools is in progress. These two general categories lend
themselves to a third hybrid option, which ultimately is the safest and most
efficient method. Because
hybrid options would incorporate the best of both options, it would thus
avoid much of their lacking points. For instance, the vehicle based
development has basically turned the car into a dull bus or train, where the
user only controls his destination. On the other hand the human based
development does make the driving experience more interesting, however with
the sacrifice of a lot of safety. A hybrid system would incorporate safety
and precision, without hindering the excitement and independence of driving a
car. Our team has
proposed hybrid system, called Hy(B)ridX that we believe will
best suite the blind and everyone in the vicinity of the vehicle. This system
includes artificial eye equipment, road side sensors, GPS navigation and
radar equipment for collision prevention. This system is only a supposed
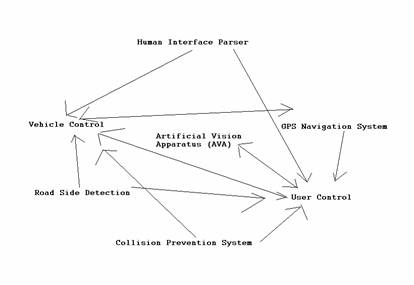
design and mustn’t be taken as an accurate attempt to solve any problem. -Hy(B)ridX
Specifications: Component Breakdown: [ ] Artificial Vision Apparatus (AVA) [ ] GPS Navigation System [ ] Road Side Detection [ ] Collision Prevention System [ ] Human Interface Parser Artificial Vision Apparatus (AVA) The
AVA component provides rudimentary vision and also conveys information
received through its ports. It consists of a small video camera that is
mounted on the user, along with a picture translation unit. This translation
unit will take the electronic signal received from the camera and “translate”
it into a form that the brain can understand. Besides providing vision, it
can also be hooked up to other electronic sources (possibly even wirelessly)
providing a 6th sense-like capability. This 6th sense
is critical to provide information about the cars status (odometer and
speedometer readings), which cannot be picked up through a low resolution
camera. GPS Navigation System The
GPS navigation system, although not critical, is useful for the blind,
allowing for an automatic driving system option. The GPS signals will be
processed by the vehicle and forwarded to the user through the AVA’s 6th sense capability. Road Side Detection Road
side detection is the first of two critical devices for this system. It
provides the vehicle with information pertaining to the vehicle location on
the road or lane, and will make necessary adjustments to make sure the
vehicle does not swerve off the road. Collision Prevention System Collision
prevention is the second of two critical devices for this system. It uses
radar technology to detect and predict neighboring vehicle movements, and
applying pressure on the brake or gas pedal in accordance to the detection in
order to prevent any accidents with cars. This system works in tandem with
the user’s own control over the vehicle and has an override option for rare
incidents were the radar may return invalid data (such as by use of
scramblers). Human Interface Parser The
Human Interface Parser will control information flow between the vehicle and
the human and will detect the users’ emotions, voice commands, and facial
gestures and translate them into actions that the vehicle may perform. Such
operations for this could be controlling the radio, locks and windows by
voice commands, and also recognizing panic gestures and can command the
vehicle to pull over to the side of the road and call for help automatically. -System Diagram:
|
|
|
|