Table of Contents
| |||||||
WT Woodson Robotics 08-0245
![]()
Rover |
Power & Energy
To power the rover, it will be launched with pre-charged lithium-ion batteries. While the rover is on the lunar surface, it will recharge the batteries using solar panels which are mounted on the top of the rover. There will be additional solar panels which fold towards the sun, to intercept any possible solar power. A module using the thermoelectric effect [1] will charge the batteries using the temperature difference between the motors and the moon. In the event that the solar panels were to malfunction, there will be non-rechargeable nickel-cadmium batteries, as used on the Apollo missions [2]. The lithium-ion batteries are the same kind of battery that is used by laptops and small devices.. The rover will have different states of power. In one state, the rover will power all of it’s devices off the battery. There will also be a “sleep” state in which the cameras and sensors are powered off. The main computer equipment would also be powered down, and only consume enough power that will allow it to “wake up” from this state and continue on with a mission. This way, the rover will be able to go into it’s sleep state when the sun is shining towards it, and not consume any power. Then, it can continue during the daylight when the batteries are constantly being charged by the solar cells.
Camera & Sensors
Our lunar rover will have several different kinds of sensors to detect environmental conditions that may affect it. An accelerometer will detect possible vibrations on the surface of the moon, and sudden bumps. There will be three High-Definition infrared cameras on a pan and tilt base, capable of capturing video at a resolution of 3240 pixels wide by 1920 pixels high. These cameras will be able to capture any obstructions in front and to the sides of the robot. Color-blob detection will be able to tell craters apart from rocks and adjust it’s path autonomously. In addition to the three cameras, there will be a rotating laser that can scan the path, and make a three dimensional map [3] of the surface of the moon which it travels on. A gyroscope inside of the rover will be able to detect the pitch, and roll of itself. This will allow the three cameras and the rotating laser to auto-correct themselves and provide a picture level with the horizon. All of the sensors will allow the rover to move along a path, taking panoramic photos and navigating around obstacles completely autonomously.
Programming
Our rover moves autonomously. Before launch, we give it specific programming of what angle to move, how much thrusting to use, and how long to use the thrusters. All of this information would be calculated before hand by our landing calculations. Another thing that is programmed into the rover is when it feels a pressure on its treads, it will begin a different program which will upload all of the camera information and begin sending pictures of the moon. It will also begin to scan the layout, it will activate the gyroscope, and it will begin its 500 meter journey. The most crucial piece of information that will be programmed is that it will download any programs that are sent to it and will immediately stop the current program and begin running the new program immediately.
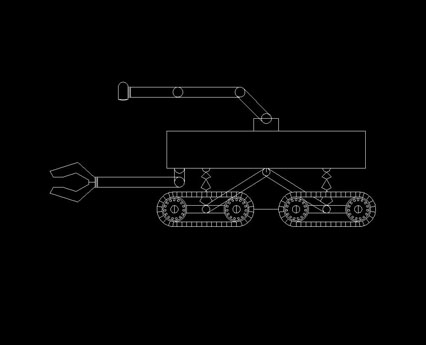
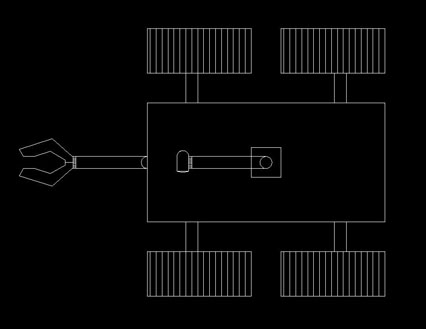
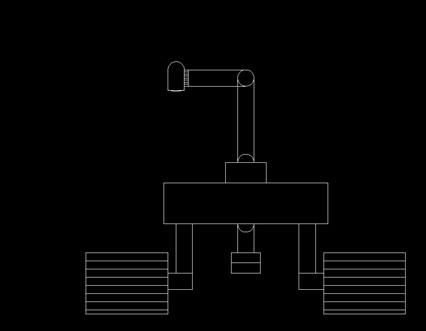
Design/Mechanical
The tracks on the robot will be moved by stepper motors, which are AC motors that are capable of moving in uniform steps that allow the distance to be calculated precisely. The gripper will be moved by high-torque servo motors so that it will be possible to move some obstructions that are near the rover. Every sub-system would have it’s own integrated computer, which would send the data back to the main computer. This way, if one of the computers fail, the whole rover still operates. The frame of the rover will be constructed of strong, but lightweight aluminum and steel. The onboard computer will use flash memory storage, so that power is not needed to avoid data loss. Incase the rover were to lose communications with earth, data will be cached on the rover. The components will be low-power, so that battery life is extended.
Communications
- How does the Moon talk with the Earth?
To get the transmissions to the rover we will bounce the radio signals off a satellite that is orbiting earth which will get the signal to the rover. This will allow communication to the rover during the majority of the day. Since the rover will be autonomous during much of the day, the radio transmissions will be during a planned time period between the rover and earth. - How much energy does it take to talk with the Earth?
Two way radios (Walkie Talkie) use on average about 2 watts to power it. Our team will be using the same philosophy and powering our rover using the same method. The one thing different about our rover is that it won’t need much communication between it and earth because the rover is going to be autonomous on most occasions. The biggest part of the communication will be moon cast of the rover moving across the moon.
Energy
- How much energy is available on the moon?
On the rover we will be using photovoltaic modules also known as solar panels. We believe that since the earth will be equal or at least very close to the same distance away from the sun as the moon so the amount of solar energy available on the moon will be the same as the energy available here on earth. The solar energy available on the moon will be sufficient to power the rover. Solar panels will be mounted in the rover and will collect solar energy which will power the rest of the rover. - How much energy is need for the rover to move the distance you want it to move?