| Tasks for Future Agrobots Robots of the future
will have even more capabilities than the ones are currently
being tested. Hopefully, the final outcome of
endeavors in rural robotics is that human involvement in the
entire process of planting, growing, and harvesting crops is
nearly supplanted.
Currently research teams are developing various robots,
including those that:
- Harvest Crops [13]
- Remove Weeds [6][10]
- Water Plants [8]
In the future robots will even be able to handle other
factors of plant growth such as:
- Regulate heat and temperature
- Prevent plant disease
- Maintain sufficient light exposure
 Essentially,
the above mentioned six capabilities are the major features
of a greenhouse, a facility that isolates and controls a
field of crops to grow. With regards to temperature
control, current greenhouses have covered glass sun roofs
that absorb and trap heat from the sun [3][4].
To apply the same concept to wide crop fields, similar
insulating material will have to be developed so that it is
cheaper to build sun roofs that cover larger areas.
The result is an extremely large green house, one that has
high labor costs if humans were assigned to maintain it.
That’s where robots come in. Essentially,
the above mentioned six capabilities are the major features
of a greenhouse, a facility that isolates and controls a
field of crops to grow. With regards to temperature
control, current greenhouses have covered glass sun roofs
that absorb and trap heat from the sun [3][4].
To apply the same concept to wide crop fields, similar
insulating material will have to be developed so that it is
cheaper to build sun roofs that cover larger areas.
The result is an extremely large green house, one that has
high labor costs if humans were assigned to maintain it.
That’s where robots come in.
Features These Robots Will Need
To begin with, these greenhouse machines will
automatically detect whether there is too much or too little
heat suitable for growing through the use of thermometers
and other devices. They will then produce or reduce
the right amount of heat to compensate, using natural
sources of energy such as chemical reactions or solar power.
Similar concepts can be applied to regulating humidity
and moisture, where robots will release calculated amounts
of water vapor into the giant greenhouse. Because
moisture and heat are now controlled, robots only have to
use a set amount of water for the plant, independent of
precipitation such as rain or snow. Humans will only
have to check the robots several times a year. Ultimately,
crops will no long be grown according to season or
geography, as the major factors of heat, moisture, and
precipitation will all be controlled.
Robots within these greenhouses will also harvest the
crops. Production will certainly increase because the robots
will operate night and day. Future robots will also
prevent plant diseases. Normally, people assigned to
apply pesticides have to wear equipment is not only
uncomfortable for the applicant, but also puts the worker at
risk of overheating and dehydration [2].
Replacing the human with robots will potentially eliminate
health risk of greenhouse workers. Robots will also
make use of more eco-friendly measures to prevent plant
atrophy, without the use of chemical pesticides.
Already, there are rural robots that autonomously and
manually remove weeds, a common nuisance to plant growers.
Technology Advances Needed
- Sun Roof Material
As mentioned above, current greenhouses have glass sun
roofs to partially control the temperature [3].
However, if the same idea were to be applied to a large
scale, say a crop field, glass would probably be too
expensive. Lighter, cheaper materials like semi
opaque plastic would have to be developed and used as the
key material to build the expansive sun roofs [1].
- Eco-friendly plant disease prevention methods.
Currently, the major plant plant being dealt with by
robots is weeds. Both Lukas and the Illinois
University model manually remove weeds instead of using
harmful chemicals [6][10].
Plants should be protected by other toxins and nuisances,
not just weeds. Although many farmers simply use
pesticides and other chemicals to prevent other diseases,
these are neither safe for the applicant nor the
environment [2].
In the future, eco-friendly methods will be invented to
immunize the plants from other diseases.
- Image Perception
Unlike humans, robots not only have difficulty viewing
real objects, but also have a hard time perceiving what
they see. While some robots like the Illinois
University weed robot claim to have "20/20" vision, other
robots including Lukas can differentiate crops from other
plants only in the best lighting and weather conditions [6][10].
Without a better sense of sight and observation, robots in
agriculture are in danger of damaging plants,
misinterpreting plant toxins as the actual crops, or even
harming other robots.
Our Ideas
Among the factors that determine plant growth, light is
the most important. With the exception of fungus, all
food grown on farms depends on the sun. Evidently, too
much or too little sunlight is detrimental to any crop.
With regards to sunlight deficiency, there is little we
can do with robots to create light because, while heat and
disease prevention can be artificially generated, most often
times the best source of light for plants is naturally
generated from our sun.
In the discussion of overabundance of sunlight, robots
can potentially offer a solution by providing shade.
Here, robots will analyze data given by light sensors and
then shade the robot by a certain amount.
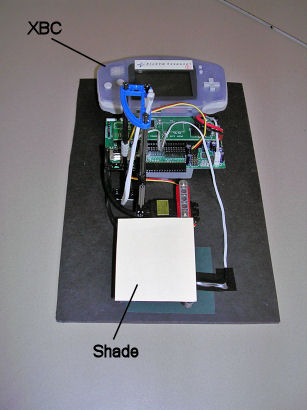
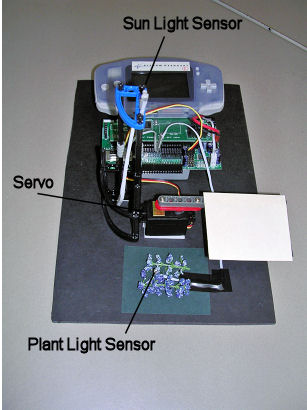
To make this project interesting, we decided to create a
working model of a automatic shade that would control the
amount of sun light reaching a plant. We are building
this model out of a Botball kit from 2006.
The Gameboy/XBC has light sensors for input and servos to
control the shade.
Here is our implementation. First the shade is closed
(too much sun), then the shade is open (cloudy).
We are certain we can immediately control the position of
a shade based on the current brightness of the sun.
But we believe the plant grows best when the cumulative
amount of the sun is controlled. For example, if it is
sunny all day, we may want the shade partially closed in the
afternoon. But if it is cloudy in the morning, we may
want the shade open all the way in the afternoon. This is a
more difficult program to create.
The shade will be adjusted on the current light and the
recent history of lighting to maintain a constant amount of
light over every day. The program below measures a
summation of light through a loop. Once the the total
light absorbed reaches a target amount, the servo will
close. Then the robot will reset the total amount absorbed
back to its initial value and start a new cycle. Future
developers may take the program a step further: once the
shade is closed, the plant light sensor will then measure
when the shade has been closed for too long.
Here is our code.
Although the program is not fully developed, the general
principle is same for the XBC and actual agrobots. In
real life, the shade itself will not be completely opaque.
And because plants can only absorb precise wavelength of
light, the shade will have to change its opacity, like a
transition, so that the crop receive the right type and
amount of light.
|