Title
Short Description
Proposal
What kinds of tasks might future agrobots need to perform?
Future agrobots will need to be able to collect data about the
condition of the fields, and send them to the farmer. The farmer can
then assess the situation and decide what action, if any, to take.
The robots will also need to till the ground and plant seeds.
Robots will be able to till with more precision and deposit seeds as they
till, saving time.
Finally, the agrobots will need to apply pesticides selectively to
crops as needed. Robots that can pull weeds would also eliminate the use
of herbicides to remove unwanted vegetation.
What features will these robots need to have?
Because this proposed robotic system is data-dependent, much of the
features involve information. The robots will have:
A connection to the online database/command center -- this will be
in the form of a wireless network, which spans across the entire field.
Communication with the farmer -- this will be in the form of a
beeper device in case the farmer is away from the computer command center
and needs to be contacted remotely in case of emergency.
Data collection devices -- the Sweedlings will be fully equipped
with sensors that will send back information about pH, nutrients,
moisture, and pest levels.
Attachments for functions of tilling, seeding, watering, weeding, and
spraying -- allow the farmer to swap out functioning parts of the
robot depending on what tasks need to be done.
What technology (or cost) advancements are needed?
Under this proposal, we are assuming that certain advances have been
made. These include:
An organized database with scientific plant health data -- this
information would include levels that are known to be ideal for certain
plants (i.e. corn grows best at certain levels of pH, nutrients,
moisture, sunlight). The pre-set conditions would act as a basis for
comparison when the agrobots collect actual data about the state of the
fields.
A command center -- that utilizes the pre-set database, and
creates a database of its own specific to the data collected from the
farm. The farmer relies on the command center to examine the state of the
farm, and to remotely give out instructions to the robots in the fields.
A long-range wireless internet infrastructure -- that is powerful
while still being fairly inexpensive, to allow for communication between
the robots, the command center, and the farmer.
More advanced sensors -- for collecting data such as chemicals in
the soil signifying that a plant is healthy. These sensors have to be
capable of executing their functions while remaining cost-efficient and
small enough to fit on the robots that use them.
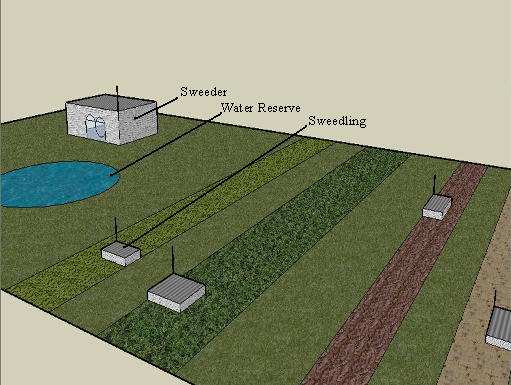
Conceptual farm layout, including the Sweeder, the Sweedlings, and the field.
The Sweeder
The Sweeder (seeder + weeder) is the robot responsible for performing the
manual tasks required in crop farming. In the early spring, the Sweeder
enters its Tilling and Seeding phase. An attachment underneath the
Sweeder will enable it to till the ground as it moves along the field.
This attachment would be fairly narrow so that the only area that is
tilled is the area where the seeds are to be deposited. This method of
tilling is known as strip tilling, and it helps to keep plants healthier
and eliminate weeds
[16]. Another attachment will drop seeds into the tilled ground as
the Sweeder moves along. There will be a third attachment for the
application of water -- it will be similar to the kinds of nozzles found
on a pressure washer or a watering can.
In the late spring through the summer, the Sweeder will be in its Feeding
and Weeding phase. A useful feature of the Sweeder is that it has
interchangeable attachments -- this allows the farmer to use one Sweeder
to perform a variety of tasks throughout the seasons. During the Feeding
and Weeding phase, the tilling/seeding attachments will be replaced with
a weeding attachment. There will also be an attachment for the
application of pesticides. Finally, the Sweeder will have a component
located on its underside allowing it to apply fertilizer to the field
evenly where needed, helping the plants to grow.
The Sweedlings
The Sweedlings (“little Sweeders”) are the information collectors. They
are much smaller than the Sweeder, but they work like a swarm in order to
evaluate a large field in a shorter amount of time. The Sweedlings carry
numerous sensors to aid them in their data collection. This includes:
A chemical/nutrient data sensor -- to measure soil nutrient
levels.
Visual data collection -- through means of an infrared camera to
detect the presence of weeds and pests.
Temperature and moisture sensors -- to detect if the soil moisture
levels and temperature are adequate for the plant.
The Sweedlings only work during the Feeding and Weeding phase. They are
responsible for gathering data about their assigned area of the field,
and reporting it back to the Sweeder and the control center.


Motion diagram of the two phases of Sweeder and Sweedling action.
Communication
Communication between the Sweeder, the Sweedlings, and the farmer is
basic, and is facilitated through a wide wireless network. The farmer
relies on the main control center, which gives status readings of each
robot, including: current location, power levels, and data collected. The
control center also receives updates from two NASA satellites, Landsat 7
[17] (which monitors the
ground and gives feedback on the field)and TRMM [18] (which moderates and predicts
weather patterns), so that informed decision-making can take place. Next,
the Sweeder receives downloads the information it needs from the
database, and follows the day's special instructions. They send
information about job completions via a wireless internet antennae, and
the control center logs its progress. Finally, the Sweedlings are
assigned a portion of the field, which they check for signs of pests,
lack of water, or lack of nutrients. These findings are also sent to the
control center to be analyzed. In some cases, the Sweedlings will find a
problematic area. When the control center processes this data, it will
give the problem an urgency rating. The farmer can give the robots
permissions to create their own solution if the urgency rating is
relatively low -- but if it is high, the farmer must have a say in the
type of treatment that occurs. Although this robotic system is
autonomous, the farmer has authority over the entire decision-making
process.
Navigation
Use the links to navigate around the site.