Team: 04-0001
 |
|
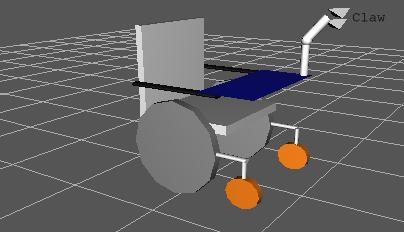
Our Solution The EAGLE Chair Ergonomic Autonomous Guided (self) Lightweight Economical The EAGLE chair is our concept for the ideal robotic wheelchair. More than a vehicle, it could be an assistant of its own. We believe that disabled individuals should not need to spend energy constantly directing themselves—the act of getting from place to place should be as natural as that of able-bodied people. Our idea involves a wheelchair that could take care of itself and its user; it could move, direct, and manipulate objects autonomously, at the will of the person in it. The frame of the chair would be a very lightweight yet strong material with an integrated manipulator arm. The brain of the chair would be an affordable standard laptop computer.
The EAGLE Chair has the technology to “go where no wheelchair has ever gone before”. Our chair features a sort of “high-tech GPS” system that makes for effortless mobility, a robotic arm that allows it’s occupant to out-stretch a hand to grab objects, and even the power to know what to do and when. This is useful for any individual in need of assistance.
Like the iBOT, the EAGLE Chair can traverse stairs and uneven surfaces. Unlike the iBOT, it works autonomously, and remembers the location of the obstacle and method to conquer it again or can auto detect those obstacles. It can go up steep inclines, stairs, step ladders, and traverses any terrain with ease. While in its normal state, the EAGLE Chair can reach speeds up to thirty miles per hour; faster than any bicycle. It can climb stairs (no greater than 1 ft. high) at a rate of 2 per second. With only a fifteen second lag period while changing states, the motor drive unit is years ahead of its time. With the EAGLE Chair, physical limitations to the users are a thing of the past. It can turn in a two foot radius, and opens doors with the robotic arms. At the grocery store, it pushes carts, and can even reach things on the top shelf. In every day life, this wonderful creation will perform the menial tasks of getting from here to there efficiently, and without error. Our robotic wheelchair has several ways of being instructed to maneuver. Some of these ways include the twitching of an eye, the breath waves, by connecting a nerve to a wheelchair, or by just plain talking to the wheelchair. If the wheelchair is commanded to go somewhere, it will know exactly where it is, thus, taking the user to the destination. As you can see, the EAGLE Chair is an innovative and creative approach to assisting those with physical limitations. Though it is still a conceptual idea, we believe that with today's ingenuity and tomorrow's technology, it will not only be possible, but also a necessity to those in need.
|