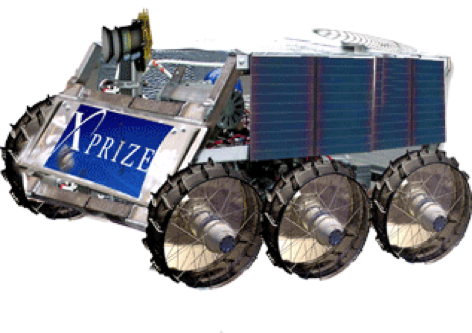
Overall size: 3.5 ft. by 2.5 ft.
Chasis: carbon composite body
Mass: 150 Lbs
Wheel diameter: 60cm
Power: 200 w nominal
78W idle/
30W hibernation
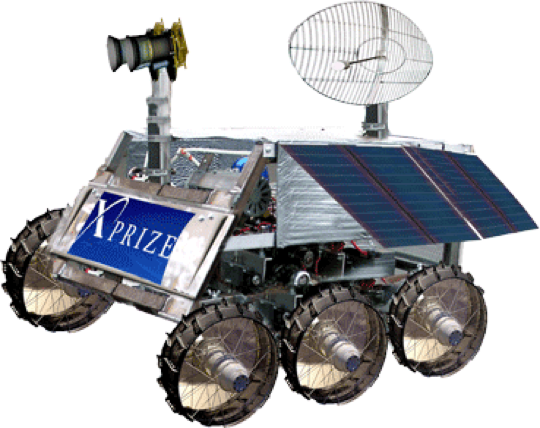
Sensors: low-power, laser-based sensors for travel during the lunar night
Obstacle avoidance system
Running light in the front for night
Instrument Payload:
Robotic drilling arm for sample collection
Spectrometer system for water detection