We looked at bees and found out which things help the bee do the work of pollinating. We did not need to copy everything that a bee does. We don’t need the stinger, we don’t necessarily need six legs, the three body parts, the two antenna, or the multifaceted eyes. But our robotic pollinator does need to copy many of the things about bees. Our robotic pollinator needs a way to communicate with the other robotic pollinators and a central computer. It needs to pick up pollen and then drop it off on other flowers. The robot will have to be able to fly from flower to flower. It also has to be small like a bee so it won’t damage the flowers.
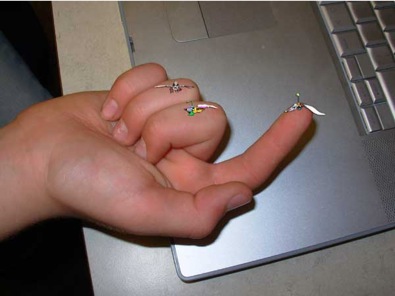
At first we thought the robot should have legs to move around on the flowers to collect the pollen, but after considering the power consumption and the necessary motors to operate multiple legs, we decided that this would not be practical. The robot will move around by hovering lightly on the flowers and using a small foot to move gently over the pollen tubes. The wings will be able to tilt in different directions to let the robot hover like a real bee. Real bees can hover, back up, go forward, and change direction very quickly.
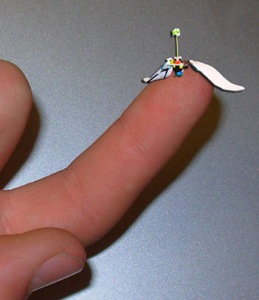
Our design will have a body shape folded out of strong sheet then metal or composite. The frame will be out of metal struts. The wings will be covered in an extremely thin material.
Our Solution
From big things with wheels to small things with wings.
Our solution to the problem of pollinating almonds trees is to make a autonomous robotic pollinator. These robots will work together in groups going out to individual flowers, collecting pollen, and then visiting more flowers to distribute the pollen.
The first thing we did was to study honeybees because that is what we wanted to base our robotic pollinator on. We thought it would be a good idea to copy the natural world because bees have been doing the job of pollinating for thousands of years. Nature does things well. This science is called biomimetics.
Biomimetics is copying good design from nature. When we make a new technology we can find the base of how it works in the natural environment. Some examples: Velcro was invented by Georges de Mestral after studying how burrs use little hooks to attach to dog’s fur. Packaging that doesn’t leak could be made by learning how an apple holds so much liquid. 95% of an apple is liquid but it doesn’t spill when you eat it.

There are 50,000 bees in each hive and in California for the almond pollination it takes over a million hives, that’s 50 billion bees. Because not all of the bees go out to collect pollen, we don’t think we will need that many robotic pollinators. Also, our robots can work longer, night and day, and in bad weather. But we will need a lot of them to cover the amount of orchards. They will need to work as an ecosytem, talking to each other and following a plan to cover all of the trees. They will need to be very inexpensive and easily replaced. We will also need a delivery system to get the bees distributed around the orchards. We plan to have stations positioned evenly through out the orchard much like they now put bee hives around an orchard. It takes 5 - 8 hives to cover about 2.5 acres of orchard.
![[4]](Our%20Solution_files/shapeimage_2.png)