Welcome to 06-0283
Greater Lowell Technical High School
Research and Design Web Site Challenge
This year's Botball Research and Design Web Site
Challenge is Robotics in Lunar Exploration. Our destination is The Aiken Basin,
South Pole of the Moon. Our objective is to send a robot to the Moon and explore
the basin for signs of water, or ice, and how much is there. This is based
on theoretical ideas that, we as students, came up with to complete this mission.
We hope you enjoy our website on Robotics in Lunar Exploration. Just click
on the buttons on the home page to take a ride on our journey to the Aiken
Basin in the quest to find water on the moon.
The location our challenge takes place in is the Aiken Basin that can be found
in the Moon's South Pole region. It is currently the largest impact in our
Solar system. It is 2500km in diameter and 13km deep from the rim crest to
the basin floor.[5] The Aiken Basin
is very rocky and its surface is not as smooth as its highlands surrounding
the crater. The basin is mainly a big hole that is deep and cold enough to
form ice. The South Pole - Aiken Basin is composed of a mixture of lower-crustal
material and mantle rocks containing up to 20% iron oxide and 0.1% of titanium.[5]The
basin is basically covered up by basalts which are similar to dark colored
rock form lava from volcanoes on Earth. The basalts are a composition of iron,
manganese and titanium. The higher amount of both iron oxide and titanium
dioxide is in the highlands of the moon. There have not been actual measurements
only what the spacecraft Clementine has gathered of these minerals because
scientists on Earth have not yet been able to collect samples of these materials
physically from the basin.[5]
NASA launched the Lunar Prospector and the Clementine
that carried instruments such as a gamma-ray spectrometer, magnetometer, neutron
spectrometer and electron reflectometer to take readings of the moon. Some
of these devices were used to plot the surface of the moon geography that
showed the terrain of the basin to be crater ridden, rocky and uneven. The
neutron spectrometer cannot directly detect water but it can locate concentrations
of hydrogen which might be ice under the temperature of the lunar poles. We
would focus our search in the basin on where the neutron spectrometer found
the highest concentrations of hydrogen and is the least geologically treacherous
terrain based on the data collected by Lunar Prospector and the Clementine.[4]
For this mission the use of MER robots, like Spirit and Opportunity, currently
exploring Mars, would not be effective. This is because the MER rovers run
on solar energy. There is no sun light in the Aiken Basin. Having a robot
run on solar power where there is no sunlight will be pointless. Also, the
terrain is fairly smooth on Mars compared to the terrain of the Aiken Basin
that is very rough and covered with deep craters. The MER rovers are designed
to roll over smooth surfaces and avoid rocks and obstacles. MER rovers work
well on Mars because there is a power source available from the sun and a
fairly smooth terrain.[2] The opposite
exists where we are going.
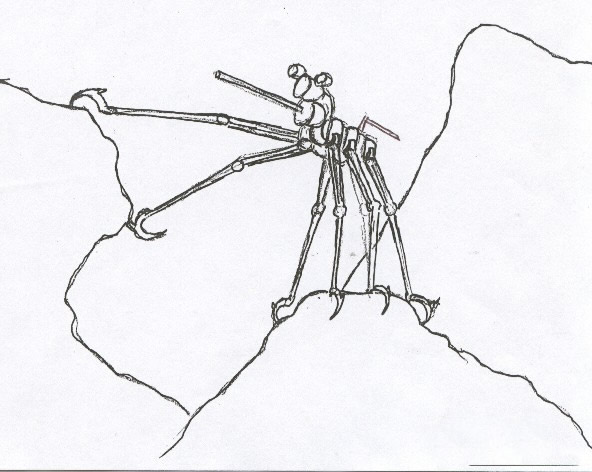
Our robot is not a rover like Spirit and Opportunity. It’s like a spider-bot
or, as we like to call it “RoboSpyder”.[1]
Having a robot that can move like a spider will benefit this mission much
more than a rover-like robot would because we feel from our research the terrain
deep in the basin is rocky and uneven. A robot that moves like a spider will
be able to climb up, over and around obstacles that we expect to find in the
basin.
The RoboSpyder will be controlled by a suffocated microprocessor running programs
that can be updated as needed similar to the MER rovers by satellite.[2]
The area where a spiders’ eight eyes normally are will be sets of infrared
sensors for navigation and a sets of cameras and lights that can be turned
on and off remotely to record pictures and video. It will also be equipped
with a sensor to detect a fuel cell beacon.
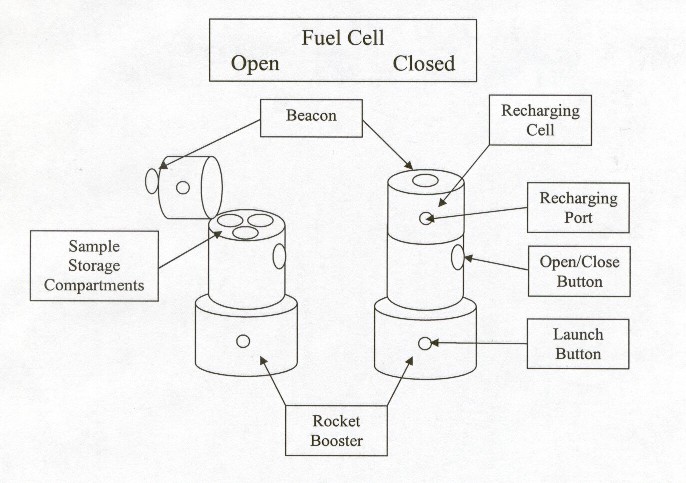
Due to the lack of sun light in the basin, we have decided that the best source
of power that we have to run RoboSpyder is from a battery. A battery that
is capable of being recharged by attaching itself to a fuel cell. When the
RoboSpyder is deployed from a shuttle hundreds of fuel cells will be dropped
in strategic areas that would be considered best case areas for signs of water.
These fuel cells would serve two purposes, first to recharge the RoboSpyder,
second to bring back samples that the RoboSpyder gathered.
The fuel cell would be equipped with a button that the RoboSpyder could press
to open and close the top part of the cell to allow samples to be deposited.
The top part of the cell would store the energy to recharge the RoboSpyder.
It would contain a port that the RoboSpyder could plug into. The bottom part
of fuel cells would be equipped with enough rocket propulsion to launch from
the moons’ zero gravity surface into space where a shuttle could retrieve
it.
With the help of information that we already know from the data Clementine
and Lunar Prospector, we can incorporate what equipment they had and embedded
it onto our RoboSpyder. Our job in this mission is to get to these hydrogen
concentration areas that may lead to ice and the highest concentration is
the Aiken Basin[3]. RoboSpyder is going
to be equipped with devices similar to the spacecraft Clementine, which orbited
the moon. We are going to put a laser altimeter, a device that sends out laser
pulse on the environment and base on how long it takes to reflect back from
the surface. The longer the time it takes to reflect, the deeper the spot
of the area would be. This will prevent the robot from coming in contact with
large obstacles. Another important instrument that we are going to put on
our robotic spider is a Neutron spectrometer that can detect concentrations
of Hydrogen. This device will be the main device that will help find some
form of water, which might be ice located in the deepest and darkest regions
of the basin. The data that the Neutron spectrometer acquires will be transmitted
back through satellite.[4]
When the Neutron spectrometer detects an area that is
worthy of taking a sample the RoboSpyder will activate its drilling device
that is attached to its head region. Whatever samples that are collected will
remain in the chamber of the drilling device until RoboSpyder gets back to
a fuel cell to deposit it. RoboSpyder positions itself over the area of one
of the chambers of the fuel cell and reverses the drilling device to deposit
the sample. RoboSpyder is equipped with an extra modified limb on the tail
side that it uses to control the fuel cell and recharge itself. The RoboSpyder
would deposit collected samples into compartments in the fuel cell. The RoboSpyder
recharged itself through its extra modified limb by plugging into the port
on the top part of the fuel cell. RoboSpyder empties the fuel cell, loads
the samples, seals the compartments by pressing the open/close button and
initiates the launch by pressing the launch button. The fuel cell will launch
after the RoboSpyder is clear of the area. The fuel cell in also be equipped
with a beacon so that both the RoboSpyder and shuttle could detect them. RoboSpyder
would continue searching for signs of water and the nearest fuel cell beacon.
When the RoboSpyers’ power gets low or it needs to deposit a sample
it would make its way to the nearest fuel cell beacon. When RoboSpyder finds
a fuel cell that is not standing upright it will have the ability to re-position
the fuel cell with its front arms.
The RoboSpyder will keep looking until there are no more fuel cells. RoboSpyder
will have a shut down feature when all fuel cell are spent. Future shuttle
missions will be able to retrieve the fuel cells floating in space and deposit
more fuel cells around RoboSpyder. At which time RoboSpyder will be reactivated
and be on the hunt again.
[1] http://www.space.com/businesstechnology/technology/spider_bot_030129.html
[2] http://marsrovers.jpl.nasa.gov/home/index.html
[3] http://lunar.arc.neas.gov/results/ice/eureka.htm
[4] http:/physicsweb.org/articles/worl/12/7/8/1
[5] http://www.psrd.hawaii.edu/July98/spa.html
[6]
www.nasa.gov